3.6 POD类型
类别:部分人
POD是英文中Plain Old Data的缩写。POD在C++中是非常重要的一个概念,通常用于说明一个类型的属性,尤其是用户自定义类型的属性。POD属性在C++11中往往又是构建其他C++概念的基础,事实上,在C++11标准中,POD出现的概率相当高。因此学习C++,尤其是在C++11中,了解POD的概念是非常必要的。
POD意如其名。Plain,表示了POD是个普通的类型,在C++中常见的类型都有这样的属性,而不像一些存在着虚函数虚继承的类型那么特别。而Old则体现了其与C的兼容性,比如可以用最老的memcpy()函数进行复制,使用memset()进行初始化等。当然,这样的描述都太过于笼统,具体地,C++11将POD划分为两个基本概念的合集,即:平凡的(trivial)和标准布局的(standard layout)。
我们先来看一下平凡的定义。通常情况下,一个平凡的类或结构体应该符合以下定义:
1)拥有平凡的默认构造函数(trivial constructor)和析构函数(trivial destructor)。
平凡的默认构造函数就是说构造函数“什么都不干”。通常情况下,不定义类的构造函数,编译器就会为我们生成一个平凡的默认构造函数。而一旦定义了构造函数,即使构造函数不包含参数,函数体里也没有任何的代码,那么该构造函数也不再是“平凡”的。比如:
struct NoTrivial{NoTrivial();};
在NoTrivial的定义中,构造函数就不是平凡的,这对于析构函数来讲也类似。但这样的类型声明并非“无可救药”地“非平凡化”(non-trivial)了,在第7章中,可以看到如何使用=default关键字来显式地声明缺省版本的构造函数,从而使得类型恢复“平凡化”。
2)拥有平凡的拷贝构造函数(trivial copy constructor)和移动构造函数(trivial move constructor)。平凡的拷贝构造函数基本上等同于使用memcpy进行类型的构造。同平凡的默认构造函数一样,不声明拷贝构造函数的话,编译器会帮程序员自动地生成。同样地,可以显式地使用=default声明默认拷贝构造函数。
而平凡移动构造函数跟平凡的拷贝构造函数类似,只不过是用于移动语义。
3)拥有平凡的拷贝赋值运算符(trivial assignment operator)和移动赋值运算符(trivialmove operator)。这基本上与平凡的拷贝构造函数和平凡的移动构造运算符类似。
4)不能包含虚函数以及虚基类。
以上4点虽然看似复杂,不过在C++11中,我们可以通过一些辅助的类模板来帮我们进行以上属性的判断。
template<typename T>struct std::is_trivial;
类模板is_trivial的成员value可以用于判断T的类型是否是一个平凡的类型。除了类和结构体外,is_trivial还可以对内置的标量类型数据(比如int、float都属于平凡类型)及数组类型(元素是平凡类型的数组总是平凡的)进行判断。
我们可以看看代码清单3-34所示的例子。
代码清单3-34
include <iostream>
include <type_traits>
using namespace std;
struct Trivial1{};
struct Trivial2{
public:
int a;
private:
int b;
};
struct Trivial3{
Trivial1 a;
Trivial2 b;
};
struct Trivial4{
Trivial2 a[23];
};
struct Trivial5{
int x;
static int y;
};
struct NonTrivial1{
NonTrivial1():z(42){}
int z;
};
struct NonTrivial2{
NonTrivial2();
int w;
};
NonTrivial2::NonTrivial2()=default;
struct NonTrivial3{
Trivial5 c;
virtual void f();
};
int main(){
cout<<is_trivial<Trivial1>::value<<endl;//1
cout<<is_trivial<Trivial2>::value<<endl;//1
cout<<is_trivial<Trivial3>::value<<endl;//1
cout<<is_trivial<Trivial4>::value<<endl;//1
cout<<is_trivial<Trivial5>::value<<endl;//1
cout<<is_trivial<NonTrivial1>::value<<endl;//0
cout<<is_trivial<NonTrivial2>::value<<endl;//0
cout<<is_trivial<NonTrivial3>::value<<endl;//0
return 0;
}
//编译选项:g++ -std=c++11 3-6-1.cpp
读者可以依照代码清单3-34的输出结果核对上面提到的4种规则。
POD包含的另外一个概念是标准布局。标准布局的类或结构体应该符合以下定义:
1)所有非静态成员有相同的访问权限(public,private,protected)。
这一点非常好理解,比如:
struct{
public:
int a;
private:
int b;
};
成员a和b就拥有不同的访问权限,因此该匿名结构体不是标准布局的。如果去掉private关键字的话,那么,该匿名结构体就符合标准布局的定义了。
struct{
public:
int a;
int b;
};
2)在类或者结构体继承时,满足以下两种情况之一:
❑派生类中有非静态成员,且只有一个仅包含静态成员的基类。
❑基类有非静态成员,而派生类没有非静态成员。
这样的类或者结构体,也是标准布局的。比如下面的例子:
struct B1{static int a;};
struct D1:B1{int d;};
struct B2{int a;};
struct D2:B2{static int d;};
struct D3:B2,B1{static int d;};
struct D4:B2{int d;};
struct D5:B2,D1{};
D1、D2和D3都是标准布局的,而D4和D5则不属于标准布局的。这实际上使得非静态成员只要同时出现在派生类和基类间,其即不属于标准布局的。而多重继承也会导致类型布局的一些变化,所以一旦非静态成员出现在多个基类中,派生类也不属于标准布局的。
3)类中第一个非静态成员的类型与其基类不同。
这条规则非常特别,用于形如:
struct A:B{B b;};
这样的情况。这里A类型不是一个标准布局的类型,因为第一个非静态成员变量b的类型跟A所继承的类型B相同。而形如:
struct C:B{int a;B b;};
则是一个标准布局的类型。
读者可能对这个规则感到不解,不过该规则实际上是基于C++中允许优化不包含成员的基类而产生的。我们可以看看代码清单3-35这个例子。
代码清单3-35
include <iostream>
using namespace std;
struct B1{};
struct B2{};
struct D1:B1{
B1 b;//第一个非静态变量跟基类相同
int i;
};
struct D2:B1{
B2 b;
int i;
};
int main(){
D1 d1;
D2 d2;
cout<<hex;
cout<<reinterpret_cast<long long>(&d1)<<endl;
//7ffffd945c60
cout<<reinterpret_cast<long long>(&(d1.b))<<endl;
//7ffffd945c61
cout<<reinterpret_cast<long long>(&(d1.i))<<endl;
//7ffffd945c64
cout<<reinterpret_cast<long long>(&d2)<<endl;
//7ffffd945c50
cout<<reinterpret_cast<long long>(&(d2.b))<<endl;
//7ffffd945c50
cout<<reinterpret_cast<long long>(&(d2.i))<<endl;
//7ffffd945c54
}
//编译选项:g++ -std=c++11 3-6-2.cpp
在代码清单3-35中,我们声明了4个类。其中两个没有成员的基类B1和B2,以及两个派生于B1的派生类D1和D2。D1和D2唯一的区别是第一个非静态成员的类型。在D1中,第一个非静态成员的类型是B1,这跟它的基类相同;而D2中,第一个非静态成员的类型则是B2。直观地看,D1和D2应该是“布局相同”的,程序员应该可以使用memcpy这样的函数在这两种类型间进行拷贝,但实际上却并不是这样。
我们可以看看main函数中的状况。在main中,将D1类型的变量d1以及D2类型的变量d2的地址分别打印出来。同时我们也把它们的成员的地址打印出来。可以看到,对于d2,它和它的成员共享了一个地址(本例中,实验机上的结果为7ffffd945c50),而对于d1却没有出现类似的情况。
事实上,在C++标准中,如果基类没有成员,标准允许派生类的第一个成员与基类共享地址。因为派生类的地址总是“堆叠”在基类之上的,所以这样的地址共享,表明了基类并没有占据任何的实际空间(可以节省一点数据)。但是如果基类的第一个成员仍然是基类,在我们的例子中可以看到,编译器仍然会为基类分配1字节的空间。分配为1字节空间是由于C++标准要求类型相同的对象必须地址不同(基类地址及派生类中成员d的地址必须不同),而导致的结果是,对于D1和D2两种类型而言,其“布局”也就是不同的了。我们可以看看如图3-3所示的示意图。
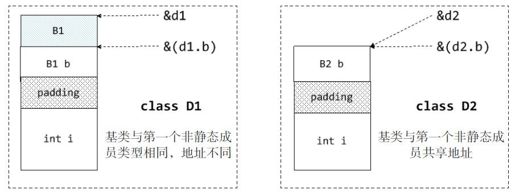
图 3-3 基类地址与派生类第一个非静态成员地址关系
所以在标准布局的解释中,C++11标准强制要求派生类的第一个非静态成员的类型必须不同于基类。
4)没有虚函数和虚基类。
5)所有非静态数据成员均符合标准布局类型,其基类也符合标准布局。这是一个递归的定义,没有什么好特别解释的。
以上5点构成了标准布局的含义,最为重要的应该是前两条。
同样,在C++11中,我们可以使用模板类来帮助判断类型是否是一个标准布局的类型。
template <typename T> struct std::is_standard_layout;
通过is_standard_layout模板类的成员value(is_standard_layout<T>::value),我们可以在代码中打印出类型的标准布局属性。那么,通过代码清单3-36所示的这个例子,我们可以加深一下对标准类型的理解。
代码清单3-36
include <iostream>
include <type_traits>
using namespace std;
struct SLayout1{};
struct SLayout2{
private:
int x;
int y;
};
struct SLayout3:SLayout1{
int x;
int y;
void f();
};
struct SLayout4:SLayout1{
int x;
SLayout1 y;
};
struct SLayout5:SLayout1,SLayout3{};
struct SLayout6{static int y;};
struct SLayout7:SLayout6{int x;};
struct NonSLayout1:SLayout1{
SLayout1 x;
int i;
};
struct NonSLayout2:SLayout2{int z;};
struct NonSLayout3:NonSLayout2{};
struct NonSLayout4{
public:
int x;
private:
int y;
};
int main(){
cout<<is_standard_layout<SLayout1>::value<<endl;//1
cout<<is_standard_layout<SLayout2>::value<<endl;//1
cout<<is_standard_layout<SLayout3>::value<<endl;//1
cout<<is_standard_layout<SLayout4>::value<<endl;//1
cout<<is_standard_layout<SLayout5>::value<<endl;//1
cout<<is_standard_layout<SLayout6>::value<<endl;//1
cout<<is_standard_layout<SLayout7>::value<<endl;//1
cout<<is_standard_layout<NonSLayout1>::value<<endl;//0
cout<<is_standard_layout<NonSLayout2>::value<<endl;//0
cout<<is_standard_layout<NonSLayout3>::value<<endl;//0
cout<<is_standard_layout<NonSLayout4>::value<<endl;//0
return 0;
}
//编译选项:g++ -std=c++11 3-6-3.cpp
同样地,读者可以对照我们上述的5条规则,自行分析一下代码清单3-36中的情况。
那么,我们现在回到POD来,对于POD而言,在C++11中的定义就是平凡的和标准布局的两个方面。同样地,要判定某一类型是否是POD,标准库中的<type_traits>头文件也为程序员提供了如下模板类:
template<typename T>struct std::is_pod;
我们可以使用std::is_pod<T>::value来判定一个类型是否是POD,如代码清单3-37所示。
代码清单3-37
include <type_traits>
include <iostream>
using namespace std;
union U{};
union U1{U1(){}};
enum E{};
typedef double*DA;
typedef void(*PF)(int,double);
int main(){
cout<<is_pod<U>::value<<endl;//1
cout<<is_pod<U1>::value<<endl;//0
cout<<is_pod<E>::value<<endl;//1
cout<<is_pod<int>::value<<endl;//1
cout<<is_pod<DA>::value<<endl;//1
cout<<is_pod<PF>::value<<endl;//1
}
//编译选项:g++ -std=c++11 3-6-4.cpp
事实上,如我们在代码清单3-37中看到的一样,很多内置类型默认都是POD的。POD最为复杂的地方还是在类或者结构体的判断。不过通过上面平凡和标准布局的判断,相信读者对POD已经有所理解。那么,使用POD有什么好处呢?我们看得到的大概有如下3点:
1)字节赋值,代码中我们可以安全地使用memset和memcpy对POD类型进行初始化和拷贝等操作。
2)提供对C内存布局兼容。C++程序可以与C函数进行相互操作,因为POD类型的数据在C与C++间的操作总是安全的。
3)保证了静态初始化的安全有效。静态初始化在很多时候能够提高程序的性能,而POD类型的对象初始化往往更加简单(比如放入目标文件的.bss段,在初始化中直接被赋0)。
如我们所提到的,理解POD对理解C++11中其他概念非常重要,之后我们还会在本书中看到很多引用POD的地方。
