!REDIRECT “https://docs.px4.io/master/ko/ros/offboard_control.html“
보드 외부 제어
Warning 보드 외부 제어는 위험합니다. 개발자에게는 충분히 보드 외부 제어 비행을 수행하기 전 준비하고 시험했으며 안전 예방책을 수립했는지 확인할 책임이 있습니다.
보드 외부 제어 개념은 오토파일럿 외부에서 동작하는 프로그램으로 PX4 비행 스택을 제어할 수 있음에 기인합니다. MAVLink 프로토콜에서 SET_POSITION_TARGET_LOCAL_NED 와 SET_ATTITUDE_TARGET 메세지로 처리가 가능합니다.
보드 외부 제어 펌웨어 설치
보드 외부 개발을 시작하기 전 펌웨어 측면에서 설정해야 할 두가지가 있습니다.
OFFBOARD 모드 활성화용 원격 조종 스위치 매핑
이 과정을 수행하려면, QGroundControl의 매개변수를 불러온 후 RC_MAP_OFFB_SW 매개변수를 찾아 OFFBOARD 모드를 활성화 할, 할당 가능한 원격 조종 채널값으로 설정합니다. OFFBOARD 모드에서 벗어나 위치 제어 상태로 진입해야 할 때 이런 식으로 원격 조종 스위치 입력을 대응을 해주면 도움이 될 수 있습니다.
MAVLink 메세지로 OFFBOARD 모드를 활성화할 수 있으므로, 이 단계를 반드시 거쳐야 하는건 아닙니다. 단, 이 방식이 훨씬 안전하다고 간주합니다.
보조 컴퓨터 인터페이스 활성화
보조 컴퓨터에 연결할 MAVLink 직렬 포트를 활성화하십시오(보조 컴퓨터 설정 참고).
하드웨어 설정
보통 보드 외부 통신을 설정하는 방법에는 세가지가 있습니다.
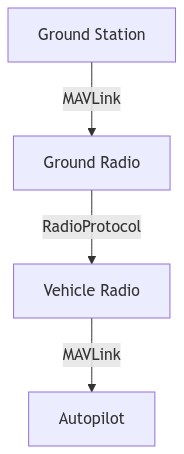
직렬 무선 통신
- UART 포트로 연결한 하나는 오토파일럿
- 한쪽은 지상 통제 장치 컴퓨터에 연결합니다
무선 통신 장치의 예는 다음과 같습니다:
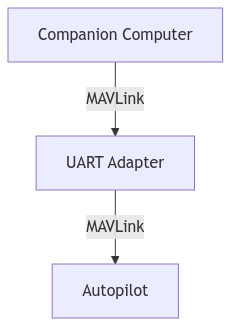
보드 내장 프로세서
장치에 붙은 소형 컴퓨터는 UART to USB 어댑터로 오토파일럿에 연결합니다. 어떤 작업을 보드상에서 처리하느냐에 따라 오토파일럿에 추가로 명령을 보내 처리할 수 있습니다.
몇가지 저전력 보드를 예로 들면:
좀 더 큰 고 전력 소비 보드를 예로 들면:
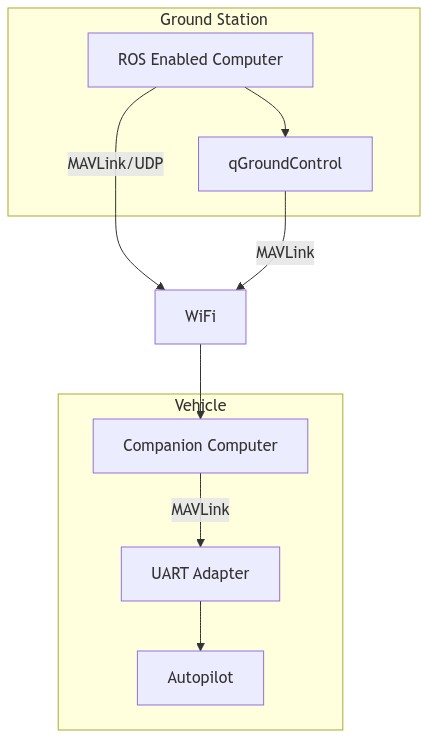
ROS로의 보드 내장 프로세서와 무선랜 링크(추천)
기체에 붙은 소형 컴퓨터는 오토파일럿에 UART to USB 어댑터로 연결하며, ROS 실행 환경에서는 지상 통제 장치와 무선랜으로 연결합니다. 위 절에서 언급한 어떤 컴퓨터는 무선랜 어댑터로 연결할 수 있습니다. 예를 들면, 인텔 NUC D34010WYB 에는 PCI 익스프레스 Half-Mini 커넥터가 있는데 여기에 Intel WiFi Link 5000 어댑터를 붙일 수 있습니다.