5.4 TSP对应的度约束线性规划的松弛
线性规划方法问世之后,没过多久就打入了旅行商的世界。Dantzig与Hotelling和约翰·冯·诺依曼的那段往事发生在1948年9月9日,而在次年秋天,Julia Robinson就公布了第一个基于线性规划的TSP解法。
在表面上看来,TSP似乎与Dantzig发明的通用经济统筹方法并不契合。事实上,如果你把五名TSP研究者关在一间房子里,让他们解释为什么线性规划方法是TSP的自然求解思路,最后很可能会得到五种截然不同的答案。我个人最欣赏的线性规划的理解方式如本章开篇一段所述,也就是将所有路线都满足的若干简单基本规则结合在一起,从而获得路线的品质保证。
在对偶性的脚本上,这一切写得明明白白:藉由对偶变量的赋值,规则之间相互结合;而通过弱对偶性定理,品质保证便水到渠成了。
让我们看看实际应用如何吧。按照之前的惯常做法,我们考虑对称的TSP,也就是旅行成本与旅行方向无关的情形。读者想必已经很熟悉用来描述这种题目的图论术语了,顶点代表的是城市,边代表的是城市间的道路。路线就是选择的一组边,这些边合起来构成一条哈密顿回路,如图5-2所示,图中给出了24座城市的完全图,红线表示一条选定的路线。
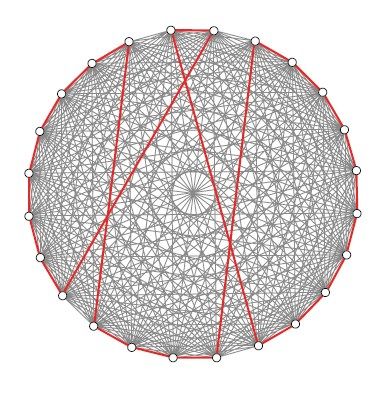
图5-2 完全图某条路线的边
画图的时候,完全可以用灰线和红线表示,但是用数学语言描述题目时,最好还是给边赋值0和1来表示两种情况:赋值为0的边不在路线里,而赋值为1的边在所给的路线中。
图5-2的例子有24座城市,因此有276个这样的值。数值太多了!如果要仔细考虑,我们难免会困在一大堆记号里动弹不得,所以我们先简化题目,看看更原始的图5-3。这里只有区区6座城市,为了确定一条路线,需要15个值。我们把连接每对顶点i和j的边所取的值记为xij,具体说来,这15个值分别为x12, x13, x14, x15, x16, x23, x24, x25, x26, x34, x35, x36, x45, x46, x56。这些就是线性规划模型中的变量,它们量度的是路线是否用到了对应的边,如果你愿意的话,也可以把它们理解为某种“经济活动强度”。
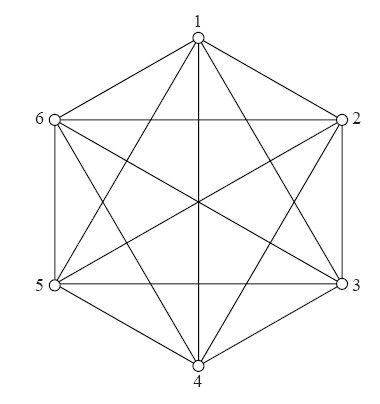
图5-3 6个顶点的完全图
我们把每对城市之间的旅行成本记为cij,这样一来,如果某条边在路线中,那么相应的cij乘以xij就等于cij,反之则该式取值为0,一条路线的总成本便可记为线性表达式c12x12 + c13x13 + …+ c56x56。这就是我们在TSP的线性规划模型中需要最小化的目标函数。至此,我们已经确定了变量和目标函数,那么约束条件如何得到呢?
哎呀,大事不妙,我们可没法直接说条件就是挑出一条路线作为解。要想使用线性规划方法,就必须严格遵照Dantzig建立的模型,严格使用线性规则。寻找合适的线性规则是我们的解法的核心之道。
5.4.1 度约束条件
开始求解时,疯帽匠指出,线性规划中的每个变量都必须是非负数。没错,可是这没什么实际效果。要想真正有所进展,我们必须仔细观察,图的边组成的子集中,能够形成路线的子集究竟有何特别之处,因为有的子集能够形成路线,有的却不能。如何利用线性约束条件区分这两种子集呢?
Julia Robinson的研究便是以此作为出发点的。她注意到,在任何路线中,图的每个顶点都恰好与两条边相连。这条规则本身并不是线性规则,不过由此可以推出,如果把经过给定顶点的所有边的xij值相加,那么得到的和必然恰好为2。因此,我们对任何一座城市都有一个度约束条件(degree constraint),从而得到线性规划模型。
目标:c12x12 + c13x13 + …+ c56x56取最小值
约束条件:
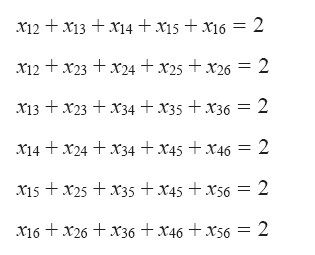
(i,j)是任意一对顶点,且xij≥0
上述模型称为TSP对应的度约束线性规划的松弛(degree LP relaxation)。
上述松弛的最优解本身往往未必是完整路线,即便如此,它依然能够提供宝贵的信息。事实上,每条路线都是线性规划的可行解,所以最优的线性规划目标函数值必然不会超过最优路线的成本,这是运用线性规划解决TSP时最需理解和领悟的重点所在。对于TSP对应的线性规划问题,我们在一大堆可行解中选择最优解,从而获得路线可能成本的一个下界,数值为X。任意路线的成本都绝对不可能低于X,就像之前我们确信产品利润绝对不可能超过450美元一样。
5.4.2 控制区
上述给出界限的思想非常重要,值得再次细细品味。所以,下面我们换种角度,重新审视度约束线性规划的松弛。这一次,我们直接研究对偶问题,采取由Michael Jünger和William Pulleyblank提出的思想,用一种漂亮的技巧处理TSP的几何题目。1在本节的说明中,我们假定TSP题目的旅行成本是各点之间的直线距离。
1. Jünger, M., W. R. Pulleyblank. 1993. In: S. D. Chatterji et al., eds. Jahrbuch Überblicke Mathematik. Vieweg, Brunschweig/Wiesbaden, Germany. 1–24.
首先,假设以一座城市为圆心、以r为半径画一个圆盘,使圆与其他所有城市都不接触,如图5-4所示。无论路线如何,旅行商必定会在旅程中的某一刻到达这座城市,为此,他到达和离开这座城市时都必须至少经过距离r。我们由此可以得出结论,每条路线的长度至少为2r。进一步,我们可以以每座城市i为圆心、分别画一个半径为ri的圆盘,只要它们互不交叉重叠即可,如图5-5所示。这样一来,任何TSP路线的长度都不短于所有圆盘半径之和的两倍,我们便得到了路线长度的一个下界。Jünger和Pulleyblank将这些圆盘命名为控制区(control zone)。
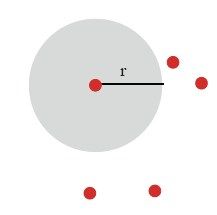
图5-4 1个控制区
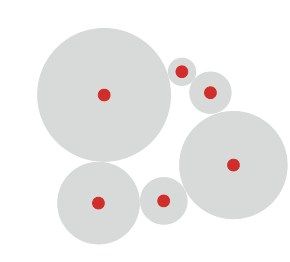
图5-5 6个控制区
图5-6 Michael Jünger(左),Regine Strobl摄;William Pulleyblank(右),Nick Harvey摄
我们希望控制区给出尽量大的下界,为此,有必要适当选择各个圆盘的半径,在互不交叠的前提条件下,使圆盘半径之和的二倍取最大值。无交叉无重叠的前提条件可以简洁地表示为:对于每对城市i和j,它们对应圆盘的半径ri与rj之和不得超过城市之间的距离,即ri与rj必须满足
由此可见,为了获得最好的一系列控制区分布,要解决如下的线性规划题目。
目标:2r1 + 2r2 + 2r3 + 2 r4 + 2r5 + 2r6取最大值;
约束条件:
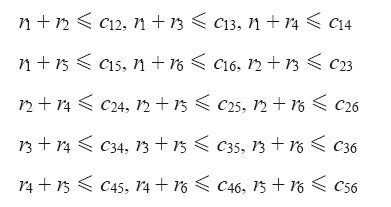
满足上述模型的任何可行解都给出一组互不交叠的控制区分布,所以同时也给出原题的所有TSP路线长度的一个下界;最优解给出的控制区下界是最强的。
读到这个命题,你也许回想起了之前提到过的弱对偶性定理。的确,控制区分布问题正是度约束线性规划的松弛问题的对偶问题!何以见得?只需注意到,对偶问题中每个顶点i都有一个系数yi对应于第i个度约束条件。当我们分别用yi乘以相应的约束条件,将它们加在一起时,得到的线性表达式中,每个变量xij前的系数必然不会大于cij的值。由于变量cij出现在第i个和第j个约束条件中,因此,我们便要求yi+yj≤cij。这个式子正是上面的互不交叠条件,唯一区别只是半径ri改用yi表示而已。
当然,我们必须承认,这里有一点投机取巧了。实际上,对偶线性规划问题允许控制区的半径取负数值,原因在于度约束条件是等式而非不等式,所以用负数与等式相乘也是完全合理的。不过,我们只是为了严谨起见而指出这一点,它对结果并没有影响,因为虽然在上面的题目中并未直接限定取值为非负数,但是根据三角不等式可以证明,必然存在一组最优的对偶系数,使得每个系数取值都是非负数。
