5.5 消去子回路
在TSP的线性规划解法中,下一步是引入一系列简单而强有力的附加规则。为此,我们再次考虑图5-5中包含6座城市的控制区分布示意图。该图中,控制区连成环状分布,很容易勾勒出一条路线,穿过各个控制区,完全不浪费任何空间。然而,一般情况下我们并没有这么幸运。如图5-7所示的现象更为常见,图中各个控制区挤成好几堆,因此勾连路线时不得不留出一大截空隙。新规则利用的正是这样的空隙。
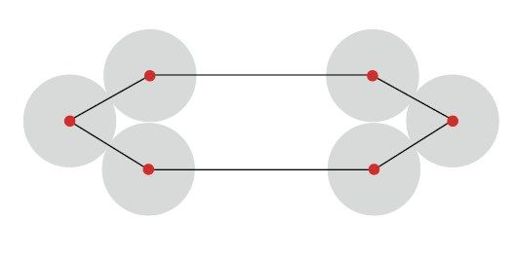
图5-7 不合适的控制区分布
下面我们描述一下新规则的几何思想。在控制区分布剩下的空隙中,可以围绕一堆点的团簇,画一条环带,如图5-8所示。任何一条路线必然在某一刻到达这一簇点,旅行商进出这组城市时,每一程都必须经过这个环带,所以总共至少要经过两次。因此,控制区给出的路线长度下界中可以加上环带最小宽度的两倍。Jünger和Pulleyblank把这样的环带称为“护城河”(moat),因为它们确实就像护城河一样。
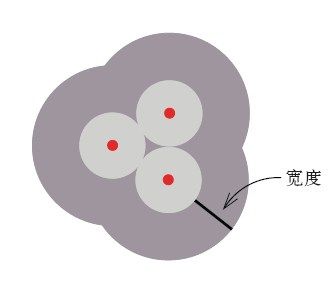
图5-8 护城河区域
如图5-9所示,在6座城市的题目中,可以使用两个护城河区域弥合控制区之间的空隙,这样一来,沿着城市勾画路线时,便同样不会浪费任何空间距离了。虽然我们并非次次都能如此幸运,充分利用一切边角空间,但是只要仔细安排护城河和控制区的分布,通常依然能够给出很强的路线长度下界。以图5-10为例,这里有100座城市,图中的分布很合理,足以证明给出的路线长度最多只比最优路线长0.65%。
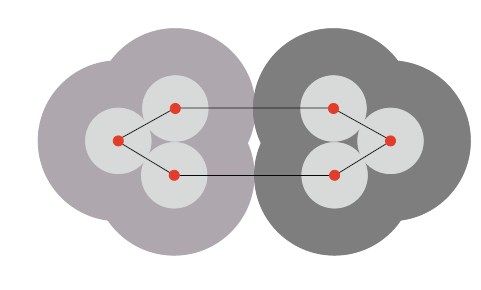
图5-9 用护城河弥合控制区之间的空隙
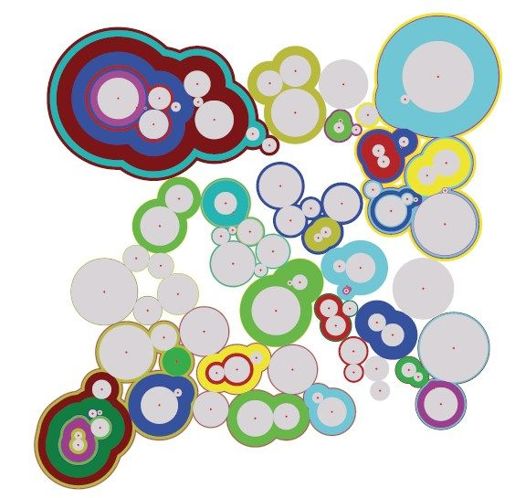
图5-10 护城河和控制区的综合分布
这个100座城市的例子很漂亮,不过如果想要更好地理解这种路线的下界,最好选择规模更小的题目实际演练。在此,我向读者推荐Geodual软件包,它是由德国科隆大学的Mike Jünger研究团队开发的。1该软件能够为20座城市左右规模的TSP题目给出最优解,同时还会提供一幅优美的护城河和控制区分布图,成果一例见图5-11。
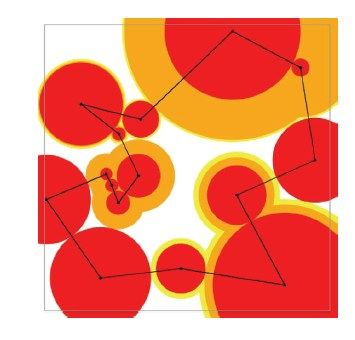
图5-11 Geodual求解15座城市的TSP时的真实截图
1. 参见http://www.informatik.uni-koeln.de/ls_juenger/research/geodual/。
5.5.1 子回路不等式
在一些TSP题目中,我们如果想用原始解构造一条路线,就会遭到度约束线性规划的松弛的无情捉弄。图5-7的6座城市TSP便是如此。事实上,考虑到跨过巨大空隙的边会有高昂的旅行成本,单纯形算法给出的解会包含两个三角形,而不是一次性走过全部点的完整回路。显然,这虽然是松弛问题的可行解,对旅行商而言却并不可行。
注意到有些边跨越城市团簇之间的空隙,如图5-12的绿色线段所示,而所有路线都必定包含至少两条这样的边,于是我们能直接做出简便的补救。仿照Jünger和Pulleyblank构建护城河的思路,我们可以提出一条规则:对应这些跨团簇的边的变量之和至少为2。

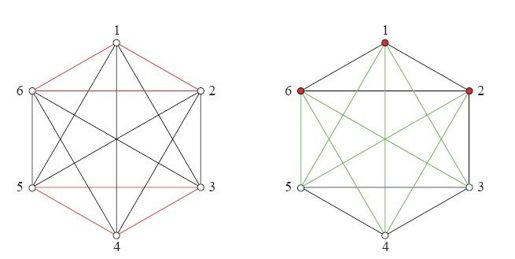
图5-12 构成子回路不等式的边
有了这个不等式,再加上度约束条件,图5-12的解便不可能包含左图中红边组成的子回路了。因此,这条规则称为子回路消去约束条件(subtour-elimination constraint),简称子回路不等式(subtour inequality)。
对于全部城市的任意适当子集S,因为一端在S中而另一端不在S中的边所对应的变量之和至少为2,可得到一个子回路不等式。图5-12中有S={1, 2, 6},而图5-13展示的例子规模更大,落在矩形框内的顶点构成了集合S,而染成绿色的各边对应于相应的子回路不等式中的各个变量。
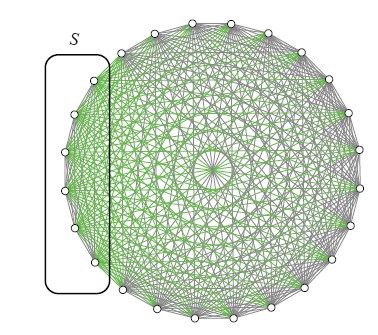
图5-13 构成子回路不等式的绿边
这些附加规则虽然简单,但通过线性规划结合在一起时却能带来巨大的威力。度约束线性规划的松弛和所有的子回路不等式联合起来,构成的模型称为子回路线性规划的松弛(subtour LP relaxation)。事实上,这种方法可以获得优质的路线长度下界,其结果对实际应用线性规划成功求解TSP举足轻重,功不可没。对于随机生成的几何题目,子回路方法给出的下界几乎每次都与最优路线相差不到1%。如果选取42座城市的环游美国数据集为例,可以看到,得到的路线长度下界是697个单位长度,而最优路线为699个单位长度。在这一特例中,与理论的品质保证相比,实际的最优路线仅仅超出0.3%而已。
5.5.2 “4/3猜想”
总体上,我们并没有这么强的品质保证,幸好,糟糕的反例看来只是偶然例外,优良的范例才是正常规则。对于满足三角不等式的题目来说,如何才能判断路线长度下界质量是好是坏?这是一个颇有意味的问题。从乐观的一方面来看,人们已经知道,最优路线的成本必然不会超过子路线下界的3/2倍。比起前一章介绍的Christofides定理,这个理论结果很出色。
但是凡事都有两方面,这个问题的负面则在于,人们已经发现了一系列题目,当城市数目增大时,它们的最优路线成本与子路线下界之比将逐步逼近4/3。4/3这个数字就是最差的可能性吗?这个问题称为“4/3猜想”(4/3rds Conjecture),加拿大渥太华大学的Sylvia Boyd是钻研该问题的顶尖专家。她与同事通力合作,已经验证确定,在不超过十座城市的所有情形下,该猜想都成立。她还提出了一个更尖锐的问题,有可能为完整解决猜想、证实最终结论提供必要的思考方向。1
1. Benoit, G., S. Boyd. 2008. Math. Oper. Res. 33, 921–931.
品质保证从3/2升级到4/3,看似只是一小步改进,但基本上,要想迈出这一小步,必须深刻理解子回路线性规划的松弛问题的可行解结构。2反过来,这样的理解也会产生新的TSP方法,提出新的解题规则,从而有机会推动实际计算超越现有的极限。
2. 麻省理工学院的Michel Goemans已经证明了若干与子回路LP松弛之解有关的重要结论。
图5-14 Sylvia Royd和Richard Haynes(左),Bellairs Workshop 2007,Nick Harvey摄;“4/3猜想”文化衫图案(右),由Bill Pulleyblank设计
5.5.3 变量取值的上界
此前没有解释过,度约束线性规划的松弛之所以非比寻常,是因为该题目必然存在所有变量取值均为0、1或2的最优解,所以我们完全不必担心边取分数值的问题。子回路的松弛并没有这个结论,它的变量赋值有时候也会出现复杂麻烦的分数。最终,我们有必要从整体上处理一般情形,但是有价值的特例能让我们赢在起跑线上。事实上,在度约束线性规划的解中,如果变量xij取值为2,就意味着对应的子回路只包含城市i和城市j一来一回的两段路途。根据S={i, j}确定的子回路不等式,可以排除这种情形,但是简单规定xij≤1可以更方便地解决这个问题。这样一来,不但使用度约束,而且限制所有变量的取值上界,就比只用度约束的基础效果更好,所以实际应用往往都采取这种做法。另外,在改进之后,初始模型必然存在所有变量取值均为0、1/2或1的最优解。它虽然不完全是整数解,总算也是八九不离十了。
