5.6 完美松弛
借助子回路不等式,我们可以将TSP的解限制在最优解附近,那么,能否再添加其他规则,大大改进所得结果呢?没问题,放心吧,能!要进一步改进结果,需要用到少许数学知识,马上你就明白了。
5.6.1 线性规划的几何本质
迄今为止,我们处理线性规划时,一直在对变量和方程进行运算,把它视为单纯的代数问题。对George Dantzig和大多数线性规划研究人员来说,这样的待遇是不公平的。在他们心目中,线性规划独具一种优雅的几何韵味。
下面,从一道小例题出发,我们试着回顾一下之前忽视了什么。
目标:x+2y取最大值
约束条件:
我们可以把该题的可行解理解成二维平面内的点(x, y),这里x和y的数值分别由水平方向和垂直方向的数轴确定。
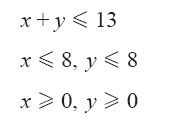
在一道线性规划题目中,全部可行解的点构成的集合称为可行域(feasible region)。为了理解可行域的范围,首先只看第一个约束条件x+y≤13。相应的直线x+y=13把所有形如(x, y)的点划分成两个集合,分别位于直线两侧,直线一侧的点都不是可行解,而直线另一侧的点以及直线上的点都是这个约束条件的可行解。可行解所在的一侧区域称为半空间(halfspace)。图5-15给出了半空间的两种不同表示形式,左图中红色箭头指向可行域一侧,右图中可行域则涂成了红色阴影。
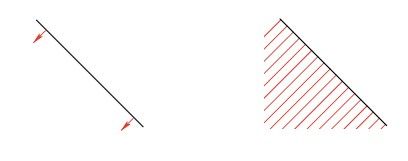
图5-15 由一个线性不等式确定的半空间
上面的线性规划例题中,有五个线性约束条件,对应五个半空间,它们的交集就是题目的可行域,如图5-16所示。在这个几何模型里,右侧小图中的蓝色直线代表目标函数,线性规划问题的目标就是尽力向上移动蓝线,同时保证它与可行域有公共点。因此,本例题的最优解就是图中的红点,坐标为(5, 8)。
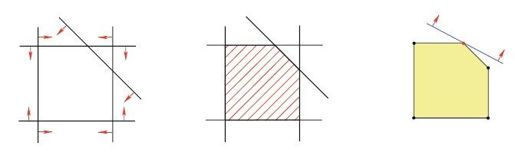
图5-16 从几何角度理解线性规划问题
请注意,最优解是可行域的五个顶点之一,另外四个点按顺时针顺序依次为(8, 5)、(8, 0)、(0, 0)和(0, 8)。在这道线性规划题目中,有一个重要结论:无论目标函数如何设定,这五个顶点中必有一个是最优解。事实上,改变目标函数就意味着改变蓝线的斜率,而尽力向某个方向移动直线时,无论移动方向如何,直线在即将离开可行域的瞬间都必定刚好触及可行域的一个顶点。
上述一般性质非常有用,它意味着线性规划问题虽然有无穷组可行解,但求解时只需要考虑顶点即可,而顶点的数目是有限的。事实上,单纯形算法的过程可以理解为沿着可行域边界移动,顺次经过各个顶点。
读到这里,你可能会问:既然只需要把顶点列出来就能解决线性规划问题,为什么还要大费周章地使用单纯形算法呢?原因归根结底在于数字。请记住George Dantzig的话:“对于大规模的问题,组合(顶点)的数目有可能非常多,可能像天上的星星一样多。”在d维空间里,一系列d维半空间的边界面相交,就得到线性规划模型的顶点。这样的交点未必总会落在可行域里,但是已经足够让试图列出所有顶点的解题者为之头疼了。
5.6.2 闵可夫斯基定理
刚才我们讨论的对象是线性规划问题的顶点,但是具体说到TSP,情况就完全相反了。对于TSP,我们已经有了所有点的完整列表,它们分别对应于图里的各条回路,但是我们却并不知道线性规划模型的可行域是什么样的。从这种角度看来,搜寻TSP规则就等于搜寻能够限制回路范围的半空间。
让我们研究得更仔细一些。在6座城市的TSP里,每条完整路线都对应于15维空间里的一个点,这15维空间里的每个维度都对应于一对城市。每个路线点的坐标都由0和1组成,其中1表示路线用到了相应两座城市之间的边。这些坐标取值或为0或为1的点组成了一个很大的集合,虽然它们都落在15维空间里,但是当我们想选出对应最短路线的点时,却没有任何可供使用的几何结构。线性规划的作用正是弥补这一缺陷。
15维空间的图像是画不出来的,所以我们转而思考二维空间的类似问题,也就是从一组形如(x, y)的点里选出一个,使某个确定的目标函数在该点处取得最大值。这里,我们要找这组点都满足的线性不等式,换言之,使这组点都落在可行一侧的半空间。如图5-17所示,根据实际题目可以逐步构造合适的不等式,最终在给定点集周围得到6个半空间,这些空间的中心区域的每个顶点都是题目条件给定的点。根据线性规划,这个结果具有出色的推论:对所得区域应用单纯形算法,便可以得到原题的最优解。
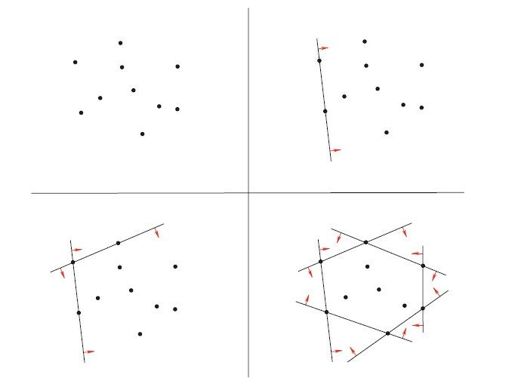
图5-17 构造线性约束条件
图5-18再次展示了图5-17最终得到的区域。该区域之所以构造得天衣无缝,并不仅仅出于偶然运气而已。实际上,我们可以通过合理构造,让任意点集都落在线性规划的可行域内,使得可行域的每个顶点都是点集里的一个点。如果是在二维空间里,请想象把一根橡皮筋抻开,然后松手让它收紧,套住所有的点;在三维空间里,请想象用塑料薄膜裹住所有点,然后加热使薄膜缩紧,再次形成完美贴合。如果维度继续增加,那么很难进行形象化的想象,但是结合代数学和几何学,不难证明相应的结论。这个结论最初发现于20世纪伊始,发现者是(赫尔曼·闵可夫斯基)Hermann Minkowski。
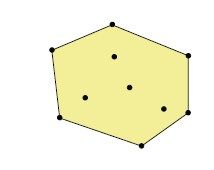
图5-18 凸包
给定一个点集,恰好紧紧包围所有点的区域称为点集的凸包(convex hull)。在二维空间里,凸包是一类特殊的多边形。在三维空间里,凸包则是具有多个小面的立体结构,像是柏拉图立体1或者钻石经过切割以后的形状,这些形体统称为凸多面体(convex polytope),数学家从很久以前开始就一直在研究它们。Günter Ziegler在专著Lectures on Polytopes(《多面体课程》)中对这一研究领域做出了出色而严谨的介绍,这本书虽然有高深的理论细节,但是引言部分以及前几章内容都值得一读,能让你充分体会为何数学家始终对这些经典几何结构一往情深。2
1. 即正多面体,共五种,分别为正四面体、立方体、正八面体、正十二面体和正二十面体。——译者注
2. Ziegler, G. 1995. Lectures on Polytopes. Springer, Berlin, Germany.
5.6.3 TSP多面体
任何TSP都可以准确描述为线性规划问题,这个结论非常重要,而闵可夫斯基定理的意义完全不在前者之下!它为寻找TSP规则的行动提供了坚实的理论支持:必需的线性不等式就在那里,只等着我们发现呢。
先别摩拳擦掌,我得提醒你,求解的时候可能会遇到困难,因为描述TSP多面体所需的半空间总数相当庞大。人们已经知道,城市数目达到10座时,所需的不等式数目就至少达到51 043 900 866个。1不过,只是数字很大的话,并不足为惧。2008年,Harold Kuhn做了一场George Dantzig纪念讲座(George Dantzig Memorial Lecture),他在演讲里强调了这一点,并在文中援引了自己在1953年的TSP研究做例子。
1. Christof, T., G. Reinelt. 2001. Int. J. Comput. Geom. Appl. 11, 423–437.
整个夏天,我跟George经常联系,一直在讨论这道题目和其他题目。我知道,夏天快结束时,他来听过我的课(Selmer Johnson、Ray Fulkerson和Alan Hoffman也来了)。我们俩都很清楚,虽然在用线性规划模型描述旅行商问题的时候,面(face,约束条件)的总数是巨大的,但是只要你能找到一道松弛问题的最优解,这道题由面的子集构成,而且这个解是一条回路,那么你就解决了这一切背后的旅行商问题。
我们需要好好学习如何使用不等式,也就是如何提出对于求解的TSP题目有用处的不等式。这是线性规划求解TSP的核心所在,第6章将对此进行深入讨论。
