9.4 TSP研究现状
Gerhard Woeginger在荷兰埃因霍芬理工大学工作,他也是克雷大奖的民间档案管理员,保管无数大胆的申领文件。他的“P与NP”网页的亮点在于,上面按照时间顺序列出了该问题的里程碑式成果,并在每条成果开始相应注明“相等”或“不相等”,例如1。
1. 网站经过更新,2013年初,上面的序号44~46已变为47~49,特此说明。——译者注
- [Not equal]: In September 2008, J. J. proved . . .
- [Not equal]: In October 2008, S. T. established . . .
- [Equal]: In November 2008, Z. A. proved . . .
翻译过来就是。
- [不相等]:2008年9月,J. J.证明了……
- [不相等]:2008年10月,S. T.证明了……
- [相等]:2008年11月,Z. A.证明了……
Woeginger提供了每篇论文的链接,有些时候还给出了反驳意见的链接。2有25篇论文支持“P=NP”,24篇论文支持“P≠NP”,双方可谓势均力敌,不相上下。读来有趣,可惜迄今为止,每篇论文都在严肃的审查面前败下阵来。
2. 参见http://www.win.tue.nl/∼gwoegi/P–versus-NP.htm。
Woeginger的列表中,25条“相等”结果都是通过设计TSP变体问题的好算法得证的。这些方法五花八门,既有简单的枚举法,也有人不辞繁复,试图针对旅行商问题,构造出多项式时间的完整的线性规划方案。它们都有严重的漏洞,无一例外。不过,求解旅行商问题确实是证明P=NP的有望途径。
9.4.1 哈密顿回路
如果你准备向百万美元的大奖迈进,而你的计划中有一步是搜寻多项式时间的TSP算法,那么有必要牢记在心:只考虑有限定条件的TSP,足矣。很多人会选择研究哈密顿回路的判定问题,探究图中是否存在哈密顿回路的判定方法。我们知道,这道题是TSP的变体,也属于NP完全问题。不仅如此,如果假定输入的图是二分图(bipartite),该问题依然是NP完全问题。所谓二分图,即顶点可以分别染色为红蓝两色,使得每条边的两个顶点都为一红一蓝。具有如上限制的特殊结构可以用在算法中,但是要论多项式时间内解决的可能性,哈密顿回路问题其实不比完整TSP简单。
在此基础上,Alon Itai、Christos Papadimitriou和Jayme Szwarcfiter思考得更加深入。他们证明,可以具体说明哈密顿回路问题,把考虑的图限定为网格图(grid graph),即无穷网格的有穷子集。取一大片矩形网格,删去顶点的一个子集,就得到网格图,如图9-3所示。网格图为回路搜索算法提供了诱人的NP完全问题目标。David Johnson和Christos Papadimitriou称之为“TSP的终极特例”。1
1. 见Lawler (1985),“Computational Complexity”(计算复杂性)章节。
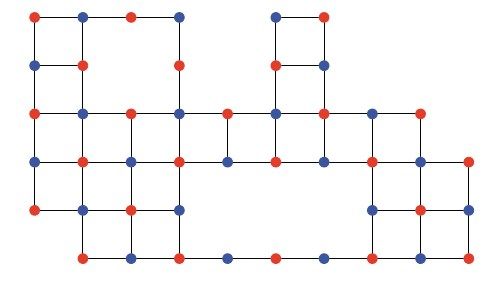
图9-3 网格图
9.4.2 几何问题
哈密顿回路问题清楚明白,没有枝节,不需要劳心计算旅行成本。可惜,对于我们多数人来说,为方便直观理解,TSP题目最好还是加以限定,使用欧几里得距离,以(x, y)坐标指明城市位置,以城市间直线距离作为旅行成本。解决这种TSP题目也能证明P=NP,收获百万美元的大奖。1
1. 为理解该结论,注意到网格图上的哈密顿回路问题可以作为欧氏距离TSP求解。
除了大奖难题以外,在同一背景下,还有另一个重要的问题悬而未决,而且乍一看令人意外:目前尚不知道,使用欧氏距离的TSP是否确实属于NP类。改用判定问题的方式来叙述,也就是问,指定数字K,是否存在长度至多为K的路线。因此,按照满足要求的路线顺序,列出所有城市,就构成了自然的证明。为简化数据显示问题,可以假定(x, y)坐标取值均为整数,则技术上的困难就在于计算平方根。近似计算每一个数的平方根都很简单,想算多少位都能轻松算出多少位,可是,把它们加起来就麻烦了,它们的和很可能距离K只差一丁点儿。要确定路线长度真的不大于K,就要算出足够精确的近似值。能否在多项式时间内做到这一点?目前尚无定论。
20世纪80年代初期,Ronald Graham普及了这道平方根之和问题。他举例说明了该题的困难之处:下面有两行数,每个都加上1 000 000,然后分别取它们的平方根之和。
1 25 31 84 87 134 158 182 198
2 18 42 66 113 116 169 175 199
例如,由第一行得到的和是√1000001+ √1000025 +. . .+ √1000198。看起来平淡无奇,可是算完就会发现,得到的两个值分别为
9000.4499835688397309490268288613590291912
9000.4499835688397309490268288613590291915
两者直到小数点后第37位才首次出现差别!一般说来,目前仍不清楚,要确定一系列平方根之和是否不大于给定数K,多项式量级的数字位数是否够用。具体到欧氏距离TSP的例子里,输入的规模是K和各个(x, y)坐标的数字位数。
解决平方根之和问题,便可长驱直入,直接证明欧氏距离TSP属于NP问题。不过,要证明一组点有长度至多为K的周游路线,这不是唯一途径,或许还有其他方式,只不过需要借助尚不为人所知的几何结构。这方面的研究很有意思。至少就TSP而言,这也许比平方根之和所需的数论方法更值得研究。
9.4.3 Held-Karp纪录
要想确定旅行商问题在多项式时间内能否解决,不管是给出肯定答案还是否定答案,大概都需要有颠覆性的革新思想才能做到。不过,另一个目标没那么困难:反复改进TSP算法最知名的运行时间界限,一点一点瓦解问题的复杂性。这种逐步方法自有其诱人之处,毕竟如果算法能获得更快的时间界限,就可能适用于实际应用,从而推进TSP的实战前线。
“没有最快,只有更快”确实是复杂性分析的座右铭。但是在TSP领域,似乎早在1962年,研究者就遇到了无法翻越的高峰——Michael Held和Richard Karp的研究成果1。他们的动态规划算法能在正比于n22n的时间内,解决任何一道n座城市的TSP题目。时至50年后的今日,境况依然如此。要超越Held-Karp纪录,或许不需要“革命”那么夸张,但显然需要令人眼前一亮的创新。
1. Held和Karp (1962).
鉴于Held和Karp是最高纪录保持者,不完整介绍一下他们的算法,实在是说不过去。为方便解说,考虑n座城市的TSP题目,城市从1到n依次编号命名,每两座城市之间的旅行成本记为cost(1, 2), cost(1, 3), 等等。
固定城市1作为旅行社的出发地,Held-Karp解法根据最优子通路得到解,而最优子通路则分别针对不包含城市1的每个城市子集和其中每个终点得出。以子集{2, 3, 4, 5, 6}为例,若选取6为终点,则所谓最优子通路需要满足:从城市1出发,到城市6结束,按任意顺序经过城市2、3、4、5,并且是所有此类通路中成本最低的。这样一条最优子通路的旅行成本记为trip({2, 3, 4, 5, 6}, 6)。为计算该值,求和式
trip({2, 3, 4, 5}, 2) + cost(2,6)
trip({2, 3, 4, 5}, 3) +cost(3,6)
trip({2, 3, 4, 5}, 4) +cost(4,6)
trip({2, 3, 4, 5}, 5) +cost(5,6)
中的最小值,这四个和分别对应子通路中倒数第二座城市的四种选择方式,即转化为首先按最优路线前往倒数第二座城市,然后再从那里出发前往城市6。
从若干个关于四座城市的数值出发,构造关于五座城市的trip值,正是Held-Karp方法的核心所在。该算法如下进行。第一步,计算所有关于一座城市的数值。这很容易,例如trip({2}, 2)就是cost(1, 2)而已。第二步,使用关于一座城市的数值,计算所有关于两座城市的数值。第三步,使用关于两座城市的数值,再计算所有关于三座城市的数值。以此类推,最后得到(n-1)座城市的数值时,即可直接读出最优路线的成本,因为在和式
trip({2,3,. . . , n}, 2) +cost(2,1)
trip({2,3,. . . , n}, 2) + cost(2,1)
trip({2,3,. . . , n}, 3) +cost(3,1)
…
trip({2,3,. . . , n}, n) +cost(n,1)
中,cost项对应于返回城市1的路程,所以最小值就是所求结果。
原理就这么简单,介绍完了。下面推算运行时间界限。首先,在n座城市的题目里,有2n-1个不包含起点的城市子集,这是基本事实。在每一个子集里,终点至多有n种取法(事实上,取法数目只是相应子集的基数,但是为方便计算,此处统一增加到最大值n),trip值计算过程包括少于n次加法和少于n次比较大小。2n-1乘以n再乘以2n,可知总步骤数不会超过n22n。
只要城市数目n超过10,那么上述运行时间界限就比枚举检验所有路线更好。但假如这个Keld-Harp结果就是最好结果,难免让人灰心丧气。在尝试突破纪录时,挑战者应当把重点放在2n项上。即使把n22n改进为n2n,也不能算是重要提升;但一旦改进为n2(1.99)n或者n22√n,就堪称重大新闻,甚至可能标志着新时代的开端,其后的新改进可能带来更好的实用方法,具有强有力的运行时间保证。2
2. 此类研究的优秀参考资料见:Woeginger, G. J. 2003. Lect. Notes Comp. Sci. 2570, 185-207.
9.4.4 割平面
若想打败Held-Karp,何不试试割平面法?Randall Munroe是xkcd.com的作者(画手)兼创始人,第1章的图1-5就是出自他笔下的TSP漫画。在发布该画作时,他的评论正中要害:“最好的线性规划割平面方法,属于哪个复杂度类呢?我遍寻而不得答案。嗨,画加菲猫的那哥们儿可不会碰到这种问题。”1
1. 请访问Randall Munroe的网站xkcd.com,在编号为399的TSP漫画上方悬停鼠标,就能看到这一评论。
割平面法是当之无愧的实际计算冠军,所以当然可以考虑把它用在TSP的复杂性分析中。
可惜,割平面法在最差情形下的性能如何,似乎不容易一窥究竟。1987年,我和Vašek Chvátal、Mark Hartmann共同证明,分支切割法有一种强的形式,需要至少2(n/72)/n2步操作,才能解决哈密顿回路问题的一道专门构造的棘手题目,而其他TSP题目甚至可能需要更多的步骤。不过该分析并未封杀所有可能性,新类型的割平面仍有可能大大改进运行时间界限。当前,人们正在搜寻性能更佳的分支切割法实现,而搜寻新的割平面恰是不错的理论目标,两者完全可以相辅相成,同步进行。
9.4.5 近优路线
一旦证明P≠NP,对于好的TSP算法便无需再抱任何希望。幸好,旅行商尚有一线生机。例如,第4章描述了Nicos Christofides提出的基于树的启发式算法,它保证能给出成本不超过最优路线之1.5倍的路线。假如能够改进这一结果,得到1.01倍的近似算法,保证给出与最优解之差小于1%的路线,又将如何?届时,该算法的快速计算机实现会成为许多相关应用的得力工具,用途超乎想象。
即便无法用来确定P与NP问题的结论,这样的近似算法必定代表了一条值得探究的路子。然而,为研究它们,就必须限制旅行成本的取值范围,排除困难的“是/非”判定问题。1Christofides本人的做法也就是通用标准做法:假定旅行成本是对称的,而且满足三角不等式,即对于任意3座城市A、B、C,从A到B和从B到C的旅行成本之和不能小于直接从A到C的旅行成本。满足这种自然条件的题目则称为TSP的度量(metric)题目。
1. 一般的哈密顿回路问题可以成功编码,方法是在图中存在对应边的各对城市之间的旅行成本都赋值为0,不存在的各对城市之间成本赋值为1。则哈密顿回路的成本为0,非最优解的路线成本均至少为1。因此,如果存在某种方法,对于任意给定的近优路线与最优路线之间误差百分比要求,都能返回符合要求的近优解,那么这种方法就能为“是/非”问题提供答案。
Christofides算法最早出现在卡耐基梅隆大学的一篇论文里。当时是1976年,他的结果似乎相当简单。可是30年过去了,一直没有改进,可见他的结果并没那么简单。确实,要找到多项式时间的α倍近似算法,满足α小于1.5且适用于一切度量题目,仍是亟待解决的难题。
公平公正地说一句,有必要指出,其实也许根本不可能超越Christofides。支持这一消极论点的依据是,Christos Papadimitriou和Santosh Vempala业已证明,除非P=NP,否则没有多项式时间的α倍近似算法能解决TSP的度量题目且满足α小于1.00452。因此,他们的研究扼杀了在P≠NP时获得极好近似算法的幻想。真正的计算壁垒在哪儿?更接近1.0045还是更接近1.5?没人知道。没法缩小这一范围固然使人不爽,不过有趣的未解研究课题列表上面可以再添一项了。
2. 准确值是220/219。
9.4.6 Arora定理
普林斯顿大学的Sanjeev Arora证明了一个重要定理,既揭示了近似方法的愿景,也揭露了它的陷阱。他证明,无论选取怎样的α值,只要超过1.0,就存在适用于欧氏距离TSP的多项式时间α倍近似算法。1注意欧氏距离的情形与度量情形不同,后者除非存在计算最优路线的多项式时间算法,否则根本不能指望这么好的结果。这是Arora定理的乐观一面,很有意思,表明欧氏距离的TSP可能比一般的度量题目更容易搞定。
1. Arora, S. 1998. J. ACM 45, 753–782. 另参见:Mitchell, J. 1999. SIAM J. Computing 28, 1298–12309.
下面指出近似方法的陷阱。虽然Arora定理是出色的理论结论,但当α值接近1.0时,近似算法的运行时间却会显著增长,实验结果更是很不理想。其实,近似方法一贯如此,因为要获得高质量的解,就需要非常精细地划分空间,同时还要以延长搜索时间为代价。要把Arora的几何方法巧妙转化为实际TSP工具,还有待后人出手解决。
