捕捉数据,即“拍摄”
2008年5月,我们在佛罗里达州的Palm Beach县花了一个周末还多的时间采集“House of Cards”视频的点数据。Radiohead那时正在那里巡演,而且他们为了减少巡演时的旅行,想要拍摄音乐视频。想要了解该产品的幕后花絮,请在GCode网站检索本章最开始处提到的“Making Of”视频。
户外Lidar拍摄
我们到达佛罗里达州之后所做的第一件事就是在制片小组租的一辆旧面包车的后面安装上Lidar。我们使用该面包车来捕捉在视频中看到的静态的景观数据,如城市及其尽头的小路。
不像DARPA城市挑战赛的汽车,我们没有把Lidar放到汽车的上方,而是把它倾斜了90°度,然后装到面包车的后面。这意味着激光可以垂直扫描环境。如果对这种拍摄方式感到困惑,你可以想象一个灯塔倾斜在一边,粘在车的后面,像一个管道的尾巴。这意味着激光器从街道旋转扫描到天空,然后再回来。每分钟这样反复旋转900次。
我们这么做是因为它能够提供非常高分辨率的区域扫描。而且事实上,在后期处理中,我们从64条激光中只分离出一条激光,这是因为它们都非常有效地扫描了同样的东西。随着面包车向前行驶,激光每次旋转都扫描了环境的唯一独特部分。
图10-5的景观就是通过这种技术捕捉的。面包车径直行驶在街道的中央。你是否发现街道上的线和街道本身垂直?这是因为Lidar是挂在背面,而且是朝下的。你可能还会注意到在公寓塔楼边上有曲线,这是由于面包车的行驶和Lidar的旋转角度交叠在一起。
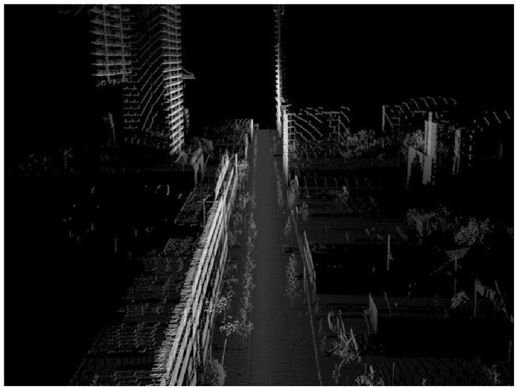
图 10-5:Velodyne Lidar的一个激光器捕捉到的数据(见彩图25)
拍摄过程进行得非常顺利。制片组已经找好了位置,因此我们径直开到每个场景,并顺序扫描它们。当我们到达了想要扫描的地方,我们就会放慢速度到10mph左右,司机会尽量把车开得平稳,然后我们就开始记录。
和摄像机不同,Lidar不会启动和停止。相反,它总是运转着,不断地旋转和输出数据。因此,我们不需要打开或关闭它,而只需要知道什么时候开始记录数据。当要开始记录数据时,我们的导演助理Larry Zience会以对Velodyne的现场工程师Rick Yoder喊“开动电脑”作为指示,Rick Yoder就会开始收集数据点。(这对于一些制片组成员而言,显得有些可笑,因为通常导演会说“开动摄像机”。)然后,Rick点击他的笔记本电脑上的一个按键,Lidar数据就开始输出到他的硬盘上。当Larry喊“停”时,我们就停止记录。
后来,Rick发给我一封信,是关于和制片组一起工作的感受:
我内心的一个感受就是这打破了一位摄影师要找到合适的镜头角度是非常困难的习惯看法。传统的摄像导演不习惯于从一堆扫描中构建模型,然后在后期处理时操纵相机的角度。他们会说:“我们想要把相机从这里移到那里,然后向上移动大约20英尺,而镜头保持约45°。”我们会说:“好极了。我们只需要把扫描器放在场景中间,你就可以在后期处理中这么做。”
图10-6显示了另一处景观。注意电线为什么会是弯弯曲曲?这是一个很简单的原因:面包车在不平滑的路上上下颠簸产生的自然的曲线。通常,这些“错误”可以通过陀螺仪、加速器以及其他精密设备来避免。在我们这种情况下,我们想要这样的“错误”。不但处理起来代价更低、操作更简单,而且它使得数据也更有趣(至少我这样认为)。完美是值得赞美的目标,但是它并非总是最具有创造性。
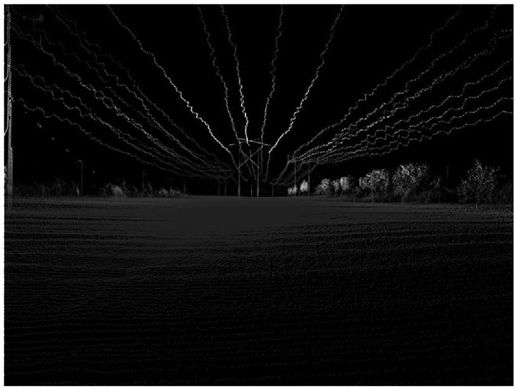
图 10-6:Velodyne Lidar捕捉到的另一幅景观图片(见彩图26)
室内Lidar拍摄
我们还把Lidar用于室内拍摄影片背景。它被用于捕捉视频中3:30和3:55时刻的派对场景。和景观场景不同,我们在这部分拍摄中使用了所有的64个Lidar激光器的数据,而不是仅仅一个。这是由于派对场景是动态的——Lidar每次旋转,点数据都会随之变化——这意味着这些点数据在视频的每个帧都有变化。因此,你看见场景中的人们正在运动。在这部分拍摄中,我们使用了正常水平放置的Lidar,这是数据以水平线方式显示的原因。
为了创建派对场景,我们从邻近的学校招募了一些电影专业的学生。有些学生精心打扮了一番,认为他们会出现在Radiohead视频中,这是他们展现自己的机会;他们几乎没有意识到,事实上我们真正需要的只是他们的身体形态。抱歉,伙计们!
如果你数一下图10-7所示图片的水平线,你会发现有64条。注意为什么图片的上半部分更亮?那是由于Lidar上方的32个激光器比下方的触发得更快。正如我之前所述,Lidar这种构建方式是由于它通常扫描很大的地形空间,要到达水平升起的地方需要更高的分辨率。
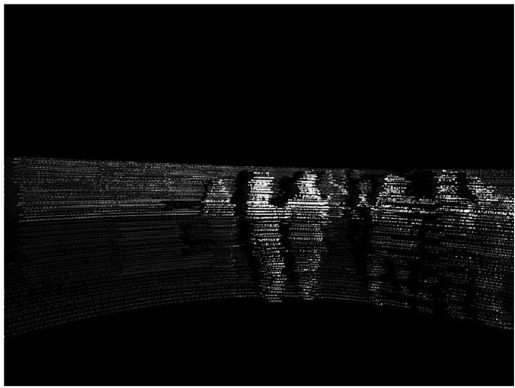
图 10-7:派对场景的一个静态图片,Velodyne Lidar捕捉,数据有64条线,每条线由Lidar的一个激光器生成(见彩图27)
遗憾的是,Lidar的分辨率很低,每个数据点约有2cm,这也是图片看起来很模糊的原因。在我看来,这一点反倒给视频增添了一丝韵味。派对通常是由那些不太认识的人组成的,而这种可视化方式能反映出这种隔离的“味道”。然而,Lidar的低分辨率无法满足对Thom Yorke拍特写。因此,我们使用GeoVideo系统。
室内GeoVideo拍摄
Thom Yorke的点云图、他的“爱人”(由Lauren Maher扮演,在视频的1:05时刻你第一次看到她)以及一些其他场景都是通过Geometric Informatics公司的GeoVideo系统采集的。
GeoVideo系统能够实现令人震撼的现实主义。如果你看了Geometric Informatics公司的网站上的演示视频,你会发现其图片的质量比我们视频中的点云要高得多。它的可视化也没有我们视频中遇到的干扰和错误。
我们的视频质量低的原因是我们故意这么做。导演James Frost并不想要一个完美的Thom Yorke的视觉化身,他想要看到的是Thom Yorke深情、缥缈的视觉幻影(见图10-8)。当观看视频的开场时,在我眼里,他不是Thom Yorker这个人,而是这位歌手的灵魂。我们在机器里看见的是幻影。
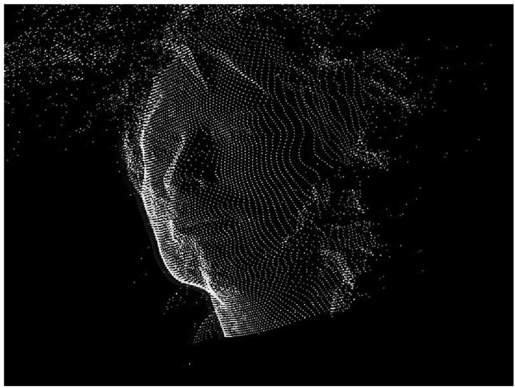
图 10-8:歌手Thom Yorke在Radiohead视频中的一张静态图片(见彩图28)
可视化中数据质量的低下和频繁错误,也使得获取数据看起来很困难。这种似是而非的困难增强了故事性。一张清晰的图片无法表达我们想要表达的意思。
在后期数据处理中,我们没有对数据中的干扰进行干预;相反地,我们为数据集创建干扰。制片公司购买了很多道具来打破现场的数据,包括把一些很小的镜子粘到一面有机玻璃上,在扫描器前洒一些羽毛,在Thom前把水倒在有机玻璃上来制造“流水”景象。最后,用镜子把数据干扰成无组织的方式效果最佳;羽毛在数据干扰上的效果差强人意;而水吸收光线,在数据集中只是生成一些空白点。
室内拍摄花了大约10个小时的时间,包含GeoVideo和Lidar。对于所有包含Thom的场景,为了防止数据丢失,我们很小心地把数据存储到了多个硬盘上,因为担心这些数据万一丢失,我们可能就无法再拍摄出同样的效果了。
