1.2 自动控制系统基本概念
在现代工业生产过程中,为了提高产品质量和生产效率,需要对生产设备和工艺过程进行控制,使被控的物理量按照期望的规律变化。这些被控制的设备或过程称为控制对象或对象,被控制的物理量称为被控制量或输出量。
在实际的条件下,生产设备或工艺过程有许多外部作用,一般只考虑对输出量影响最大的量,这些量称为输入量。
从对被控对象和输出量的影响来看,输入量可分为两种类型。一种输入作用是为了保证对象的行为达到所要求的目标,这一类输入量称为控制量或给定量。另一种输入作用则相反,它妨碍对象的行为达到目标,这类作用称为扰动作用,输入量称为扰动量。
控制的任务实际上就是形成控制作用的变化规律,使得不管是否存在扰动对象都能得到所期望的行为。
所谓自动控制系统就是在无人直接操作或干预的条件下,通过控制器使控制对象自动地按照给定的规律运行,使被控量能够按照给定的规律变化。系统是指为完成一定要求和任务的部件或功能的组合,它们相互影响,协调地完成给定的要求和任务。能够实现自动控制的系统称为自动控制系统。
1.2.1 开环控制系统与闭环控制系统
如果控制系统的输出量对系统没有控制作用,则这种系统称为开环控制系统。图1.1表示了开环控制系统输入量与输出量之间的关系。
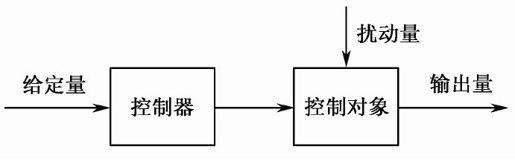
图1.1 开环控制示意图
这里,给定量直接经过控制器作用于控制对象,不需要将输出量反馈到输入端与给定量进行比较,所以只有给定量影响输出量。当出现外部扰动或内部扰动时,若没有人的干预,输出量将不能按照给定量所希望的状态去工作。
闭环控制系统是把输出量检测出来,经过物理量的转换,再反馈到输入端与给定量进行比较(相减),并利用比较后的偏差信号,经过控制器或调节器对控制对象进行控制,抑制内部或外部扰动对输出量的影响,从而减小输出量的误差。图1.2表示了闭环控制系统输入量、输出量和反馈量之间的关系。
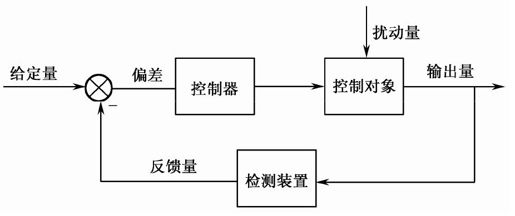
图1.2 闭环控制示意图
这种系统把输出量直接或间接地反馈到输入端形成闭环,参与系统的控制,所以称为闭环控制系统。由于系统是根据负反馈原理按偏差进行控制的,因此也称为反馈系统或偏差控制系统。
在现代工业生产中,按照偏差控制的闭环系统种类繁多,尽管它们的控制任务不同,具体结构不完全相同,但是,检测偏差、利用偏差信号对控制对象进行控制,以减小或纠正输出量的偏差这一控制过程都是相同的。
这种系统的特点可归纳如下:
(1)在开环系统中,只有输入量对输出量产生控制作用;从控制结构上看,只有从输入端到输出端、从左向右的信号传递通道(该通道称为正向通道)。在闭环控制系统中,除正向通道外,还必须有从右向左、从输出端到输入端的信号传递通道,使输出信号也参与控制作用,该通道称为反馈通道。闭环控制系统就是由正向通道和负反馈通道组成的。
(2)为了检测偏差,必须直接或间接地检测出输出量,并将其变换为与输入量相同的物理量,以便与给定量相比较,得出偏差信号。所以闭环系统必须有检测环节、给定环节和比较环节。
(3)闭环控制系统是利用偏差量作为控制信号来纠正偏差的,因此系统中必须具有执行纠正偏差这一任务的执行机构。闭环系统正是靠放大了的偏差信号来推动执行机构,进一步对控制对象进行控制的。只要输出量与给定量之间存在偏差,就自动纠正输出量与期望值之间的误差,因此可以构成精确的控制系统。
反馈控制系统广泛地应用于各个工业部门,例如加热炉的温度控制、机器手的控制等。
在有些系统中,将开环控制和闭环控制结合在一起,构成一个开环—闭环控制系统,这种系统称为复合控制系统。
本书中提到的自动控制系统主要是指闭环控制系统。
1.2.2 闭环控制系统组成结构
闭环控制系统有各种不同的形式,但是概括起来,一般均由以下基本环节组成,如图1.3所示。
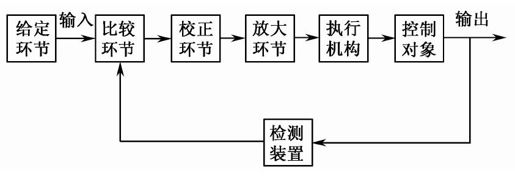
图1.3 闭环控制系统结构图
(1)给定环节:它是设定被控制量的给定值的装置,如电位器等,给定环节的精度对被控制量的控制精度有较大的影响,现代的控制系统一般采用控制精度高的数字给定装置。
(2)比较环节:比较环节将所检测的被控制量和给定量进行比较,确定两者之间的偏差量。该偏差量由于功率较小或者物理性质不同,还不能直接作用于执行机构,所以在执行机构与比较环节之间还有中间环节。
(3)中间环节:中间环节一般是放大元件,将偏差信号变换成适于控制执行机构工作的信号。根据控制的要求,中间环节可以是一个简单的功率放大环节,或者是将偏差信号变换为适于执行结构工作的物理量,如液压伺服放大器。常常除了要求中间环节将偏差信号放大以外,还希望它能按某种规律对偏差信号进行运算,用运算的结构控制执行机构,以改善被控制量的稳态和暂态性能,这种中间环节常称为校正环节。
(4)执行机构:一般由传动装置和调节机构组成,执行机构直接作用于控制对象,使被控制量达到所要求的数值。
(5)控制对象或调节对象:它是指要进行控制的设备或过程,相应地,控制系统所控制的某个物理量就是系统的输出量或被控量,闭环控制系统的任务就是控制这些系统输出量的变化规律,以满足生产工艺的要求。
(6)检测装置或传感器:用于检测被控制量,并将其转换为与给定量统一的物理量。检测装置的精度和特性直接影响控制系统的控制品质,它是构成自动控制系统的关键元件,所以一般应要求检测装置的测量精度高、反应灵敏、性能稳定等。
在控制系统中,通常把比较环节、校正环节和放大环节合在一起称为控制装置。
1.2.3 反馈控制系统品质要求
在反馈控制系统中,当扰动量或给定量(或给定量的变化规律)发生变化时,被控量偏离了给定量(或给定量的变化规律)而产生偏差,通过反馈控制的作用,经过短暂的过渡过程,被控量又趋于或恢复到原来的稳态值,或按照新的给定量(或给定量的变化规律)稳定下来,这时系统从原来的平衡状态过渡到新的平衡状态。我们把被控量处于变化状态的过程称为动态或暂态,而把被控量处于相对稳定的状态称为静态或稳态。
反馈控制系统品质要求可以归结为稳定性(长期稳定性)、快速性(相对稳定性)和准确性(精度)。
- 稳定性
稳定性对于不同的系统有不同的要求。对于恒值系统,要求当系统受到扰动后,经过一定时间的调整能够回到原来的期望值;对于随动系统,要求被控制量始终跟踪参量的变化。
稳定性是对系统的基本要求,不稳定的系统不能实现预定任务。稳定性通常由系统的结构决定,与外界因素无关。
- 快速性
快速性是指对过渡过程的形式和快慢提出的要求,一般称为动态性能或暂态性能。一个自动控制系统还应能满足暂态性能的要求。如果控制对象的惯性很大,系统的反馈又不及时,则被控量在暂态过程中将产生过大的偏差,到达稳态的时间加长,并呈现各种不同的暂态过程。
一般来说,在合理的结构和适当的系统参数下,一个系统的暂态过程多属于衰减振荡过程,即被控量变化很快并产生超调,经过几个振荡后,达到新的稳定工作状态。为了满足生产工艺的要求,往往要求系统的暂态过程不仅是稳定的,并且进行得越快越好,振荡程度越小越好。前者是暂态过程的稳定性问题,后者是暂态过程的性能问题。这些都是设计闭环控制系统时必须研究的问题。
- 准确性
准确性通常用稳态误差来表示,所谓稳态误差是指系统达到稳态时,输出量的实际值和期望值之间的误差。这一性能表示稳态时的控制精度,一个设计合理的自动控制系统其稳态特性应能满足工艺的要求。
在参考输入信号作用下,当系统达到稳态后,其稳态输出与参考输入所要求的期望输出之差叫做给定稳态误差。显然,这种误差越小,表示系统的输出跟随参考输入的精度越高。
一个闭环控制系统往往在满足稳态精度和暂态品质之间存在着矛盾,例如要求稳态精度高,往往不能得到很好的暂态性能。因此必须兼顾这两方面的要求,根据具体情况合理地解决。
