9.5 综合实例及MATLAB/Simulink应用
下面通过一个综合实例,讲述MATLAB/Simulink在本章中的应用。
【例9-13】 给定如下线性定常系统:
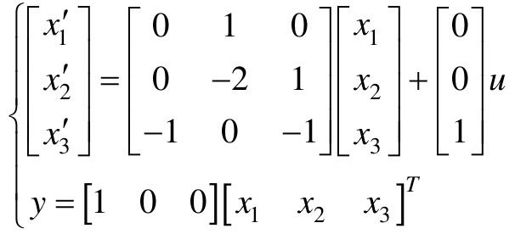
试利用MATLAB进行以下分析:
(1)分析系统的可控性、可观性;
(2)对系统进行非奇异线性变换,使其状态转移矩阵对角化,进而分析变换后系统的可控性、可观性;
(3)分析系统的稳定性,绘制系统的阶跃响应曲线;
(4)使用LTI Viewer工具绘制上述系统的阶跃响应和冲激响应曲线。
解:利用MATLAB求解的基本步骤如下。
【步骤1】 建立控制系统的数学模型。
题设中的系统采用状态空间的方式给出,所以建模时需要利用ss()命令,相应的MATLAB代码如下:
- clear all; %清除工作空间的变量
- A = [0 1 0; 0 -2 1; -1 0 -1]; B = [0;0;1]; C = [1 0 0]; D = 0;
- sys = ss(A,B,C,D) %利用ss()命令建立状态空间模型
程序运行后,在MATLAB工作空间建立系统的状态空间模型。
【步骤2】 检验此系统的可控性和可观性。
相应的MATLAB代码如下:
- control_matrix = ctrb(A,B); %检验控制系统的可控性
- rank_control = rank(control_matrix);
- if rank_control < 3 %根据题意,可知能控矩阵的秩小于3时,系统不可控
- disp('系统不可控!');
- else
- disp('系统可控!');
- end
- observe_matrix = obsv(A,C); %检验控制系统的可观性
- rank_observe = rank(observe_matrix);
- if rank_observe < 3 %根据题意,可知能观矩阵的秩小于3时,系统可观
- disp('系统不可观!');
- else
- disp('系统可观!');
- end
程序的运行结果为:
- 系统可控!
- 系统可观!
可见,题目中给定的系统是完成能控能观的。
【步骤3】 对系统进行线性对角化变换。
需要利用求取矩阵特征值和特征向量的命令eig(),相应的MATLAB代码如下:
- [V,S] = eig(A) %求取矩阵特征值和特征向量
- if rank(V) == 3 %矩阵满秩,进行对角化变换
- AA = inv(V) * A * V;
- BB = inv(V) * B;
- CC = C * V;
- sys_diag = ss(AA,BB,CC,D)
- else
- disp('这个系统不可对角化');
- end
程序运行结果为:
- a = x1 x2 x3
- x1 -0.338+0.562i 1.39e-017-4.16e-016i 2.64e-016+4.23e-016i
- x2 1.39e-017+4.72e-016i -0.338-0.562i 1.39e-017-6.66e-01
- x3 1e-016+1.49e-016i 1.22e-016-1.29e-016i -2.32+7.91e-01
- b = u1
- x1 0.593+0.398i
- x2 0.593-0.398i
- x3 -0.619+4.55e-017i
- c = x1 x2 x3
- y1 -0.459-0.39i -0.459+0.39i -0.379
- d = u1
- y1 0
由于数值计算的精度问题,上面的结果中矩阵a、b、c实际应为

不难看出,此时系统的状态矩阵确实为对角矩阵。
【步骤4】 分析线性变换后的系统可控性及可观性。
相应的MATLAB代码如下:
- control_matrix = ctrb(AA,BB); %检验控制系统的可控性
- rank_control = rank(control_matrix);
- if rank_control < 3 %根据题意,可知能控矩阵的秩小于3时,系统不可控
- disp('线性变换后系统不可控!');
- else
- disp('线性变换后系统可控!');
- end
- observe_matrix = obsv(AA,CC); %检验控制系统的可观性
- rank_observe = rank(observe_matrix);
- if rank_observe < 3 %根据题意,可知能观矩阵的秩小于3时,系统可观
- disp('线性变换后系统不可观!');
- else
- disp('线性变换后系统可观!');
- end
程序运行结果为:
- 线性变换后系统可控!
- 线性变换后系统可观!
这也验证了“对系统进行非奇异线性变换,不改变其原有的可控性和可观性”。
【步骤5】 分析系统的稳定性。
利用李雅普诺夫方法,分析系统的稳定性,相应的MATLAB代码如下:
- P = lyap(A',eye(3)) %利用李雅普诺夫方法分析系统的稳定性
程序运行的结果为:
- P = 3.5000 1.5000 0.5000
- 1.5000 1.0000 0.5000
- 0.5000 0.5000 1.0000
不难看出,P矩阵为正定的,因此系统是渐进稳定的。
【步骤6】 绘制系统的阶跃响应曲线。
相应的MATLAB代码如下:
- step(sys) %绘制阶跃响应曲线
运行程序,输出结果如图9.17所示。
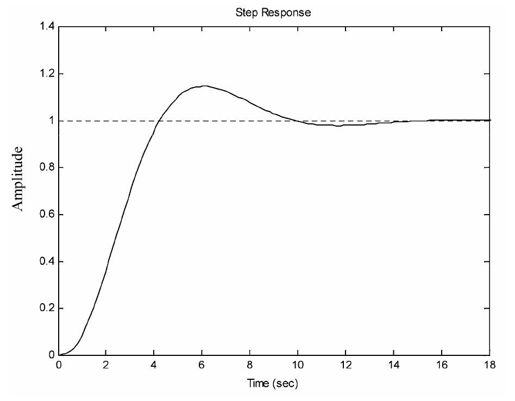
图9.17 系统的阶跃响应曲线
曲线收敛,验证了(4)中得出的结论:系统渐进稳定,因此这是一个既可控、又可观的渐进稳定线性定常系统。
【步骤7】 使用LTI Viewer工具进行分析。
用LTI Viewer工具绘制上述系统的阶跃响应曲线。代码如下:
- ltiview; % 调用LTI Viewer工具
在LTI Viewer工具中,导入控制系统模型sys,并且选择Plot Configurations,同时绘制系统sys的阶跃响应曲线和冲激响应曲线,结果如图9.18所示。
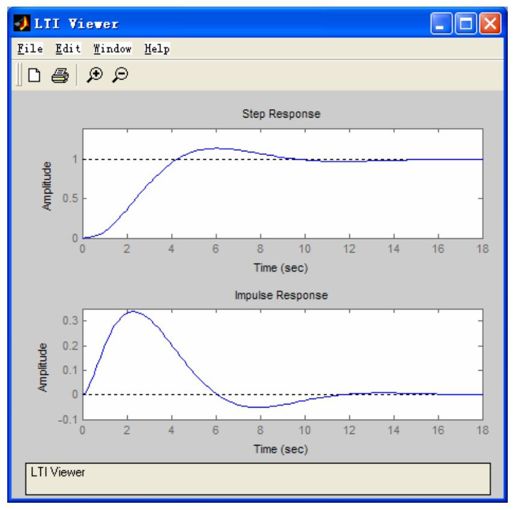
图9.18 用LTI Viewer工具进行线性系统的状态空间分析
从图9.18中不难看出,题设中的线性系统是渐进稳定的。这与步骤5得出的结论是完全一致的。
习 题
【9.1】 已知系统的状态方程如下:

(1)利用MATLAB建立控制系统的数学模型;
(2)编程绘制上述系统的阶跃响应和冲激响应,并分析系统稳定性;
(3)练习使用LTI Viewer工具,绘制系统的阶跃响应曲线和冲激响应曲线;
(4)计算上述系统的能控矩阵和能观矩阵,给出系统的能控性和能观性。
【9.2】 将如下几个系统化为特征值规范型。
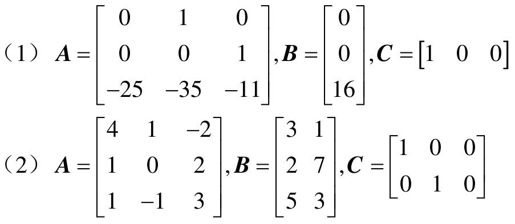
【9.3】 给定系统的状态方程如下:
(1)利用MATLAB建立控制系统的数学模型;
(2)分析系统的可控性和可观性;
(3)计算系统的传递函数;
(4)根据传递函数,计算系统的零极点,并判断系统的稳定性;
(5)利用LTI Viewer工具绘制系统的阶跃响应曲线,验证系统的稳定性。
【9.4】 判断如下系统的可控子空间维数(可控子空间维数等于可控性矩阵的秩)。
【9.5】 判断如下系统的可观子空间维数(可观子空间维数等于可观性矩阵的秩)。
【9.6】 给定系统
(1)利用MATLAB建立控制系统的数学模型;
(2)判断系统的可控性和可观性;如果不是完全可控或完全可观的,则计算其可控子空间维数和可观子空间维数;
(3)计算上述系统的传递函数;
(4)根据得到的传递函数,计算系统的零极点,判断系统的稳定性;
(5)在LTI Viewer中,绘制系统的阶跃响应曲线,验证系统的稳定性;
(6)利用李雅普诺夫方法,判断系统的稳定性,分析结果是否与第(4)问吻合。
