2.7 复数和复变函数运算
复数及在其基础上发展起来的复变函数这一重要的数学分支,解决了许多实变函数无法解决的问题,有着广泛的工程应用。
复变函数是控制工程的数学基础,常用来描述控制系统模型的传递函数就属于复变函数。MATLAB支持在运算和函数中使用复数或复数矩阵,还支持复变函数运算。下面讲述MATLAB中的基本复数运算,以及留数运算、泰勒级数、傅里叶变换、拉普拉斯变换和Z变换。
2.7.1 复数运算基础
- 复数的一般表示
MATLAB是以i或j字元来代表虚部复数运算的。
一个复数可表示为:x=a+bi,其中a称为实部,b称为虚部。
也可写成复指数形式:x=reiθ。其中r称为复数的模,又记为|x|;θ称为复数的幅角,又记为arctan(x),且满足如下关系:
具体采用哪种表示方法取决于实际问题。一般而言,第一种问题适合处理复数的代数运算,第二种方法适合处理复数旋转等涉及幅角改变的问题。
一个复数也可以看做关于实部和虚部的符号函数。因此,既可以直接构造复数,也可以用符号函数构造复数。下面分别介绍这两种构造方法。
(1)用直接法构造两种形式的复数。直接法就是利用符号i或j来表示复数单位,将复数看做完整的一个表达式输入。其具体形式也有两种,可以用实部和虚部形式表示,也可以用复指数形式表示。
(2)用符号函数法构造两种形式的复数。所谓符号函数法就是将复数看成函数形式,其实部和虚部看做自变量,用syms来构造,用subs对符号函数中自变量进行赋值。
【例2-9】 构造复数实例。试分别使用上述两种方法在MATLAB中构造复数x=-1+i。
解:在MATLAB命令窗口中输入:
- x1=-1+i %直接法构造,实部虚部形式
- x2=sqrt(2)*exp(i*(3*pi/4)) %直接法构造,复指数形式
- %符号函数法构造,实部虚部形式
- syms a b real; %声明a,b为实数型
- x3=a+b*i %实部虚部形式复数的符号表达
- subs(x3,{a,b},{-1,1}) %代入具体值
- %符号函数法构造,复指数形式
- syms r ct real; %声明r,ct为实数型
- x4=r*exp(ct*i); %复指数形式复数的符号表达
- subs(x4,{r,ct},{sqrt(2),3*pi/4}) %代入具体值
输出结果为:
- x1 = -1.0000 + 1.0000i
- x2 = -1.0000 + 1.0000i
- x3 = -1.0000 + 1.0000i
- x4 = -1.0000 + 1.0000i
- 复数矩阵的表示
MATLAB中矩阵运算贯穿始终,复数矩阵也是其中的一个重要方面。由于复数矩阵的每个元素都是复数,所以对应的复数创建矩阵也有两种,即直接创建和利用符号函数创建。
复数矩阵的直接创建有两种方法:一种是由复数元素构造复数矩阵;另一种是利用两个矩阵分别做实部和虚部构造新的复数矩阵。下面举例说明复数矩阵的直接创建,另一种方法很容易实现,在此不再赘述。
(1)由复数元素构造复数矩阵。复数矩阵的每个元素都是复数,将复数作为矩阵元素并按照矩阵格式进行填充就得到了复数矩阵。
(2)由实矩阵创造复数矩阵。由两个分别作为实部和虚部的同维矩阵构造复数矩阵。
【例2-10】 由复数元素构造复数矩阵实例。构造复数矩阵 。
。
解:可直接输入各元素来构造矩阵,此处通过其复指数形式构造。
在MATLAB命令窗口中输入:
- %直接输入各元素来构造
- A1=[sqrt(2)*exp((pi/4)*i) 1+2i 1+3i;sqrt(2)*exp((-pi/4)*i) 1-2i 1-3i] %
- %由实矩阵构
- A2re=[1 1 1;1 1 1]; A2im=[1 2 3;-1 -2 -3]; A2=A2re+A2im*i
输出结果A1和A2均为:
- 1.0000 + 1.0000i 1.0000 + 2.0000i 1.0000 + 3.0000i
- 1.0000 - 1.0000i 1.0000 - 2.0000i 1.0000 - 3.0000i
- 复数绘图
对于复数函数的绘图主要有两种形式:一种是直角坐标图,即分别以复数的实部和虚部为坐标画出复数的表示图;另一种为极坐标图,即分别以复数的模和幅角为坐标画图。
MATLAB提供了绘制极坐标图的函数polar,它还可绘制出极坐标栅格线,其常用的调用格式为:
- polar(theta,rho)
其中,theta为极坐标极角,rho为极坐标矢径。
【例2-11】 复数函数绘图实例。画出函数y=t+itsin(t)在两种坐标下的表示图,如图2.12所示。
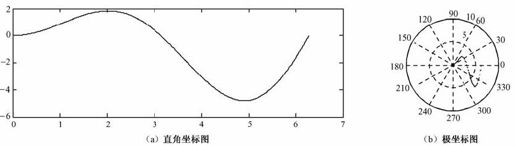
图2.12 极坐标下复数的表示
解:直角坐标图——以实部为横坐标,以虚部为纵坐标;极坐标图——以模为极半径,以幅角为极角,在MATLAB命令窗口中输入:
- t=0:0.01:2*pi; y=t+i*t.*sin(t); %直角坐标表示
- r=abs(y);bdelta=angle(y); %极坐标表示
- subplot(2,1,1)
- plot(y) %绘制直角坐标图
- title('直角坐标图') ; subplot(2,1,2)
- polar(delta,r) %绘制极坐标图
- title('极坐标图')
- 复数的结构操作函数
对于一个形如x=a+bi的复数,通常希望能够了解它自身的结构性质,包括实部、虚部、模和幅角等。MATLAB提供了方便的操作函数。下面利用实例来说明各个函数的调用方法。
表2.13 复数的结构操作函数

在MATLAB中,复数的基本运算和实数相同,都是使用相同的函数。比如复数或复数矩阵x除以y,运算命令也是x/y,与实数运算一样。因此,复数基本运算的内容此处不再赘述。
- 留数及其基本运算
留数的定义:设a是f(z)的孤立奇点,C是a的充分小的邻域内一条把a点包含在其内部的闭路,积分 称为f(z)在a点的留数或残数,记做Res[f(z),a]。
称为f(z)在a点的留数或残数,记做Res[f(z),a]。
留数定理:如果函数f(z)在闭路C上解析,在C的内部除去n个孤立奇点a1,a2,…,an外也解析,则闭路上的积分满足

如果能够求得函数f(z)在各极点的留数的显式表达,则该闭路积分很容易获得。
由罗朗展开,若a是f(z)的m重极点,则函数在该点的留数可以表示为:

至此,通过留数定理可以把闭路积分转化为简单的代数计算。
由于在工程中遇到的f(z)多数情况下为有理分式,所以可表示为如下形式:
函数residue可以求得该有理式的留数,residue的返回参数有3个,分别对应留数向量、极点向量和高阶项。
调用格式:
- [r, p, k] = residue([an an-1 … a0], [bn bn-1 … b0])
如果仅对留数感兴趣,后两个参数可省略。
2.7.2 拉普拉斯变换及逆变换
在MATLAB中,可以采用符号运算工具箱进行拉氏变换(拉普拉斯变换的简称)和拉氏反变换,采用的函数是laplace和ilaplace,使用前,用syms函数设置有关的符号变量。在MATLAB的符号工具箱中,有拉氏变换和拉氏反变换的运算函数,下面进行简单介绍。
符号变量设置函数syms的格式为:syms arg1 arg2…,用于设置符号运算中的变量arg1、arg2等。也可以用arg1=sym('arg1'); arg2=sym('arg2');…来进行符号变量设置。
当需要说明变量的数据类型时,可采用以下格式:syms arg1 arg2…datatype。其中datatype可以是实型(real)、整型(positive)、非实型(unreal)等。
laplace变换函数的格式为:
- L=laplace(F)
其中,F是时域函数表达式,约定的自变量是t,得到的拉氏变换函数是L(s)。
ilaplace拉氏反变换函数的常用格式为:
- F=ilaplace(L)
它将L拉氏函数变换为时域函数F。
【例2-12】 求函数f1(t)=eat(a为实数)、f2(t)=t-sint的拉氏变换。
解:MATLAB程序代码如下。
- syms t s a %创建符号变量
- f1=exp(a*t); f2=t-sin(t) %定义函数
- L1=laplace(f1); L2=laplace(f2) %进行拉氏变换
程序运行后,输出的结果为:
- L1 =1/(s-a)
- L2 =1/s^2-1/(s^2+1)
由运行结果可知, ,
, 。
。
【例2-13】 求函数 、
、 的拉氏反变换。
的拉氏反变换。
解:MATLAB程序代码如下。
- syms t s %创建符号变量
- F1=1/( s*(1+s^2) ); F2=(s+3)/((s+1)*(s+2) ) %定义函数
- f1=ilaplace(F1); f2=ilaplace(F2) %进行拉氏反变换
程序运行后,输出的结果为:
- f1=1-cos(t)
- f2=2*exp(-t)-exp(-2*t)
由运行结果可知,L-1[F1(S)]=1-cos(t), L-1[F2(S)]=2e-t-e-2t,t≥0。
2.7.3 Z变换及其反变换
MATLAB提供了符号运算工具箱(Symbolic Math Toolbox),可方便地进行Z变换和Z反变换,进行Z变换的函数是ztrans,进行Z反变换的函数是iztrans。
- ztrans
函数常用的调用格式如下。
F=ztrans(f):函数返回独立变量n关于符号向量f的Z变换函数: ,这是默认的调用格式。
,这是默认的调用格式。
F=ztrans(f, w):函数返回独立变量n关于符号向量f的Z变换函数,只是用w代替了默认的z: 。
。
F=ztrans(f, k, w):函数返回独立变量n关于符号向量k的Z变换函数: 。
。
- iztrans
函数常用的调用格式如下。
f=iztrans(F):函数返回独立变量z关于符号向量F的Z反变换函数,这是默认的调用格式。
f=iztrans(F, k):函数返回独立变量k关于符号向量F的Z反变换函数,只是用k代替了默认的z。
f=iztrans(F, w, k):函数返回独立变量w关于符号向量F的Z反变换函数。
【例2-14】 试求函数f1(t)=t、f2(t)=e-at、f3(t)=sin(at)的Z变换。
解:使用MATLAB提供的符号工具箱函数进行计算,程序代码如下。
- syms n a w k z T %创建符号变量,T为采样周期
- x1=ztrans(n*T); x1=simplify(x1) %进行Z变换并化简结果
- x2=ztrans(exp(-a*n*T)); x2=simplify(x2) %进行Z变换并化简结果
- x3=ztrans(sin(w*a*T), w, z) ; x3=simplify(x3) %进行Z变换并化简结果
运行结果如下:
- x1 =T*z/(z-1)^2
- x2 =z*exp(a*T)/(z*exp(a*T)-1)
- x3 =z*sin(a*T)/(z^2-2*z*cos(a*T)+1)
可见,变换结果为: 、
、 和
和 。
。
【例2-15】 试求函数 、
、 、
、 的Z变换。
的Z变换。
解:使用MATLAB提供的符号工具箱函数进行计算,由于只有时域的Z变换,因此对于拉氏域首先需要进行拉氏反变换,程序代码如下。
- syms s n t1 t2 t3 a b k z T %创建符号变量,T为采样周期
- x1= ilaplace(1/s/(s+1), t1); x1=simplify(x1) %进行拉氏反变换并化简结果
- x2= ilaplace( s/(s^2+a^2), t2) ; x2=simplify(x2) %进行拉氏反变换并化简结果
- x3= ilaplace( (a-b)/(s+a)/(s+b), t3) ; x3=simplify(x3) %进行拉氏反变换并化简结果
运行结果如下:
- x1 =1-exp(-t1)
- x2 =cos(csgn(a)*a*t2) % csgn(a)求a的符号
- x3 =-exp(-a*t3)+exp(-b*t3)
对拉氏反变换结果进行Z变换,注意把时间参数t1, t2, t3都替换成n*T,在命令窗口中输入:
- >>x1=ztrans(1-exp(-n*T)); x1=simplify(x1)
- >> x2=ztrans(cos((a^2)^(1/2)*n*T)); x2=simplify(x2)
- >> x3=ztrans(-exp(-a*n*T)+exp(-b*n*T)); x3=simplify(x3)
运行结果如下:
- x1 =z*(-1+exp(T))/(z-1)/(z*exp(T)-1)
- x2 =(z-cos(signum(a)*a*T))*z/(z^2-2*z*cos(signum(a)*a*T)+1) % signum(a)求a的符号
- x3 = -z*(-exp(a*T)+exp(b*T))/(z*exp(a*T)-1)/(z*exp(b*T)-1)
可见,变换结果为: 、
、 和
和 。
。
【例2-16】 试求函数 和
和 的Z反变换。
的Z反变换。
解:使用MATLAB提供的符号工具箱函数进行计算,程序代码如下。
- syms z a k T %创建符号变量,T为采样周期
- x1=iztrans( (2*z^2-0.5*z)/(z^2-0.5*z-0.5)); x1=simplify(x1) %进行Z反变换并化简结果
- x2=iztrans( (z+0.5)/(z^2+3*z+2) ); x2=simplify(x3) %进行Z反变换并化简结果
运行程序,输出拉氏反变换结果如下:
- x1 =(-1)^n*2^(-n)+1
- x2 =1/2*(-1)^n+3/4*(-1)^(1+n)*2^n
可见,变换结果为 和
和 。
。
