6.6 综合实例及MATLAB/Simulink应用
下面通过一个综合实例,讲述MATLAB/Simulink在本章中的应用。
【例6-10】 已知单位负反馈控制系统的开环传递函数为
(1)画出这个系统的根轨迹;
(2)确定使闭环系统稳定的增益值K;
(3)分析系统的阶跃响应性能;
(4)利用rltool对系统的性能进行分析。
解:利用MATLAB求解的基本步骤如下。
【步骤1】 建立系统的数学模型。
利用MATLAB,对该控制系统建模,代码如下。
- clc; % 清除命令窗口的显示
- clear; % 清除工作空间的所有变量
- num = [1 1]; % 开环传递函数分子多项式系数
- den = conv([1 0],conv([1 -1],[1 4])); % 开环传递函数分母多项式系数
- sys = tf(num,den) % 控制系统的开环传递函数模型
程序运行结果如下:
- Transfer function:
- s + 1
- -------------------
- s^3 + 3 s^2 - 4 s
结果输出的是用来绘制根轨迹的那部分传递函数。
【步骤2】 绘制根轨迹。
根据已经建立的数学模型,绘制系统的根轨迹曲线,代码如下:
- rlocus(sys); % 绘制系统的根轨迹曲线
- grid on; % 显示网格线
- title('根轨迹图'); % 给曲线添加标题
得到的系统根轨迹如图6.20所示。
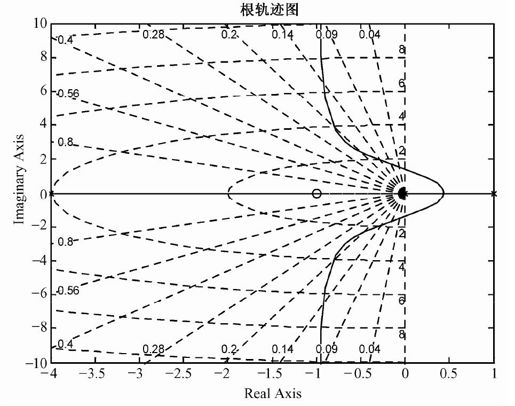
图6.20 系统根轨迹图
图6.20中,“×”表示闭环系统的极点,“○”表示闭环系统的零点。用鼠标单击图中的曲线,可以得到对应的系统增益、极点、频率等参数。如图6.21所示。
图6.21 从根轨迹图中读取系统参数
得到根轨迹图后,可以利用“rlocfind”命令计算用户选定点处的增益和其他闭环极点。根据题目要求,需要求得根轨迹穿越虚轴时的系统增益,以此确定稳定的增益范围。代码如下:
- [k,poles] = rlocfind(sys) % 计算用户所选定的点处的增益和其他闭环极点
运行程序,单击根轨迹与虚轴的交点,直接在图中进行选取,精度往往较差。可以将曲线局部放大,结果如图6.22所示。
图6.22 选取根轨迹与虚轴的交点
同时得到:
- k = 6.0018
- poles = -2.9997
- -0.0002 + 1.4145i
- -0.0002 - 1.4145i
可见,当增益K>6时,闭环系统的极点都位于虚轴的左部,处于稳定态。
【步骤3】 使用rltool进行分析。
使用根轨迹分析与设计的工具rltool,执行命令“rltool(sys)”就可以得到控制系统sys的根轨迹分析图形界面。如图6.23所示。
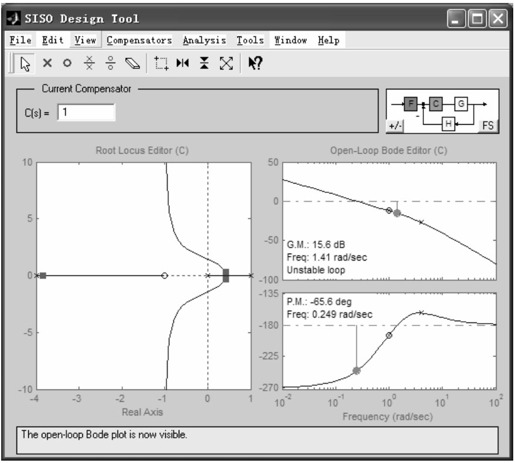
图6.23 控制系统根轨迹分析与设计器
在Current Compensator编辑器中输入不同的值,Root Locus Editor中会立刻显示出对应的极点。设定系统增益为6,如图6.24所示。
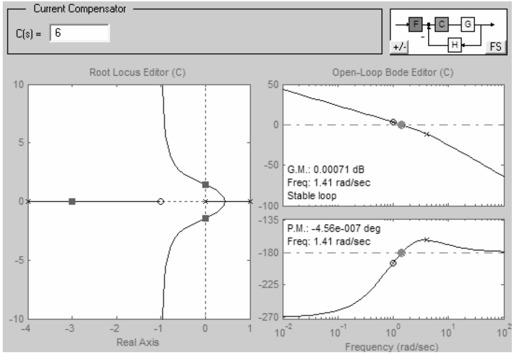
图6.24 设定系统增益为6时的根轨迹和Bode图
从图6.24中不难看出,K=6恰好是系统的临界增益,这与rlocfind命令得出的结果是相符的。利用rltool还可以在根轨迹图中增加、删除系统的零极点,是一个非常方便的工具。
至此,已经得出使系统稳定的增益范围。取K=6(临界增益),容易分析出系统此时的阶跃响应应当是等幅振荡。
此外,还可以利用rltool工具分析系统的阶跃响应。设定系统增益为20,在rltool界面下选择Analysis菜单,单击Response to Step Command,得到如图6.25所示的结果。
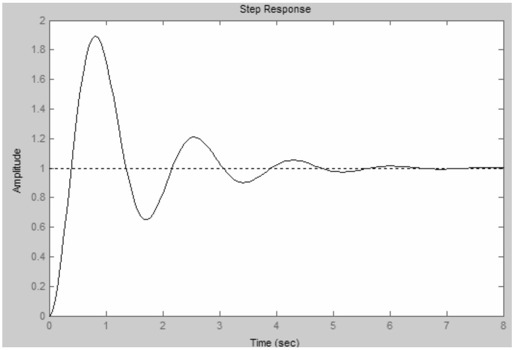
图6.25 K=20时系统的阶跃响应
可见,系统稳定,并且稳态误差为0。此时,系统的穿越频率为1.41,相角稳定裕度为17,剪切频率为3.68。
当然,还可以利用step命令直接得到阶跃响应曲线。执行“step(feedback(20*sys, 1))”即可,运行结果完全相同。
习 题
【6.1】 已知单位负反馈控制系统的前向传递函数分别为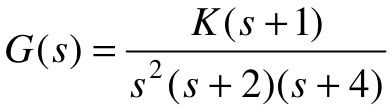 、
、 和
和 ,试利用MATLAB分别绘制各系统的根轨迹图。
,试利用MATLAB分别绘制各系统的根轨迹图。
【6.2】 某单位负反馈控制系统的开环传递函数为 。
。
(1)利用MATLAB中的rltool工具,绘制系统的根轨迹图,并确定使闭环系统稳定的K的取值范围;
(2)在rltool中,尝试添加新的极点(-3,0),观察根轨迹的变化,并且确定使闭环系统稳定的K的取值范围,继续尝试添加其他的零点、极点,分析根轨迹的变化;
(3)在Simulink中对上述系统建模,给出K取不同值时系统在阶跃信号下的响应曲线,验证(2)中的结论。
【6.3】 已知单位负反馈控制系统的开环传递函数为 。
。
(1)绘制系统的根轨迹曲线;
(2)求系统临界稳定时增益系数K的取值。
【6.4】 已知单位负反馈控制系统的开环传递函数为 。
。
(1)绘制系统的根轨迹曲线,并确定使闭环系统稳定的K的取值范围;
(2)上述控制系统的根轨迹有何特点?
【6.5】 设单位负反馈控制系统的结构如图6.A所示。
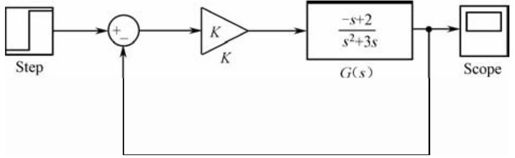
图6.A 习题
(1)在MATLAB中建立上述控制系统的数学模型;
(2)绘制系统的根轨迹曲线;
(3)判断点 是否在根轨迹曲线上;
是否在根轨迹曲线上;
(4)确定使闭环系统稳定的K的取值范围。
【6.6】 已知单位负反馈控制系统的结构如图6.B所示。
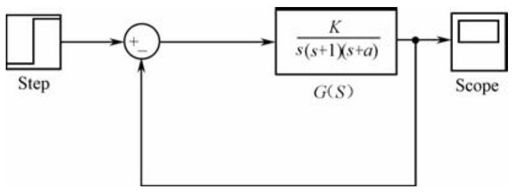
图6.B 习题
在MATLAB中编程实现如下功能:当参数a从0变化到无穷大时,绘制出系统的根轨迹族(提示:实际编程时,可以给参数a赋以几个离散的值。只需反应出根轨迹的变化趋势即可)。
【6.7】 某种机械手型机器人的传递函数为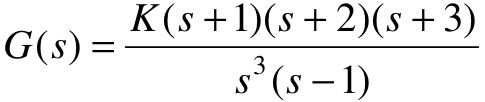 。
。
(1)在MATLAB中建立上述控制系统的数学模型;
(2)绘制机械手控制系统的根轨迹曲线;
(3)确定使闭环系统稳定时K的取值;
(4)在第三问得出的K的范围中,选取一组不同的K值,分别绘制闭环系统的阶跃响应曲线,并且比较曲线之间的异同。
