4.3 拉氏变换与控制系统模型
动态系统数学模型有多种表达形式,可以是微分方程、差分方程,也可以是传递函数、状态方程。微分方程描述的系统模型,通过求解微分方程,可以得到系统随时间变化的规律,比较直观。但是,当微分方程阶次较高时,微分方程的求解变得十分困难,不易实现,而采用拉氏变换就能把问题的求解从原来的时域变换到复频域,把微分方程变成代数方程,而代数方程的求解通常是比较简单的,求解代数方程后,再通过拉氏反变换得到微分方程的解,两者的关系及运算过程如图4.5所示。
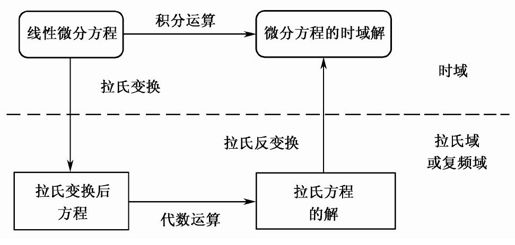
图4.5 拉氏变换和拉氏反变换
时域函数f(t)的拉氏变换定义如下:
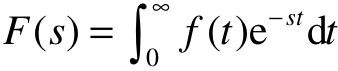
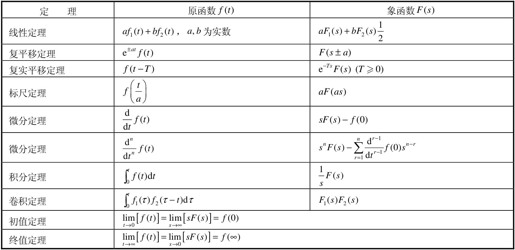
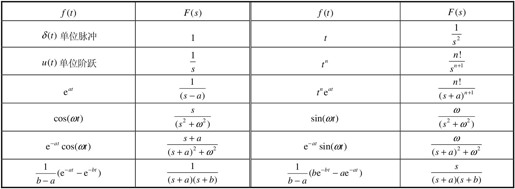
用符号表示为F(s)=£[f(t)],s称为拉氏算子,它的单位是1/时间,即频率。由于s是复数,因此它还表示复频域变量。拉氏变换的基本定理见表4.1,常用函数的拉氏变换见表4.2。
表4.1 拉氏变换的基本定理
时域函数经过拉氏变换后得到拉氏函数,拉氏反变换定义为:
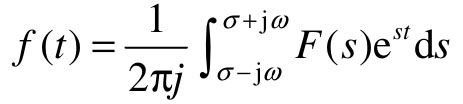
用符号表示为f(t)=£-1[F(s)]。
直接对F(s)积分来计算f(t)是复杂的,通常可通过拉氏变换表查找。
表4.2 常用函数的拉氏变换
【例4-3】 求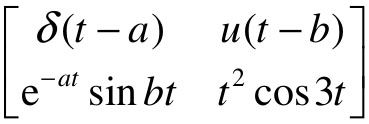 的拉氏变换。
的拉氏变换。
解:MATLAB程序代码如下。
- syms t s; %定义符号变量
- syms a b positive %定义符号变量
- Dt=sym('Dirac(t-a)'); %冲激函数delta(t-a)用Maple函数库中的定义是Dirca(t-a)
- Ut=sym('Heaviside(t-b)'); %单位阶跃函数u(t-b)用Maple函数库中的定义是Heaviside(t-b)
- Mt=[Dt, Ut;exp(-a*t)*sin(b*t), t^2*exp(-t)]; %建立矩阵
- MS=laplace(Mt, t, s) %进行拉氏变换
程序运行后,输出的结果为:
- MS = [ exp(-a*s), exp(-b*s)/s]
- [ b/((s+a)^2+b^2), 2/(1+s)^3]
