8.2 控制系统校正与综合基础
设计控制系统的目的是使控制系统满足特定的性能指标,性能指标与控制精度、相对稳定性、响应速度等因素有关。在设计控制系统时,确定控制系统性能指标是非常重要的工作。
8.2.1 控制系统性能指标
性能指标有多种形式,不同的设计方法选用的性能指标是不同的,不同的性能指标之间又存在着某些联系,这些都需要在确定性能指标时仔细考虑。
8.2.1.1 性能指标概述
按类型,控制系统的性能指标可分为:
- 时域性能指标,包括稳态性能指标和动态性能指标;
- 频域性能指标,包括开环频域指标和闭环频域指标。
性能指标分类如图8.1所示。
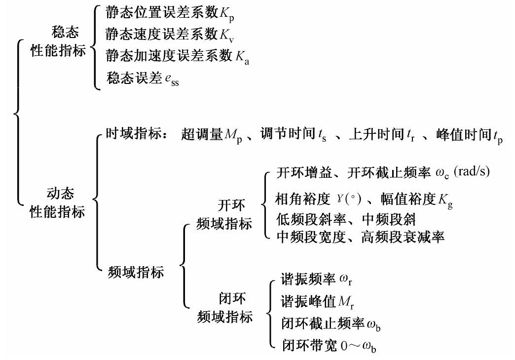
图8.1 控制系统性能指标分类图
在控制系统设计中,采用的设计方法一般依据性能指标的形式而定。如果性能指标以单位阶跃响应的峰值时间、调节时间等时域特征量给出,那么一般采用根轨迹法进行设计;如果性能指标以相角裕度、幅值裕度等频域特征量给出,那么一般采用频率法进行设计。工程上通常采用频率法进行设计,因此需要通过近似公式对时域和频域两种性能指标进行转换。
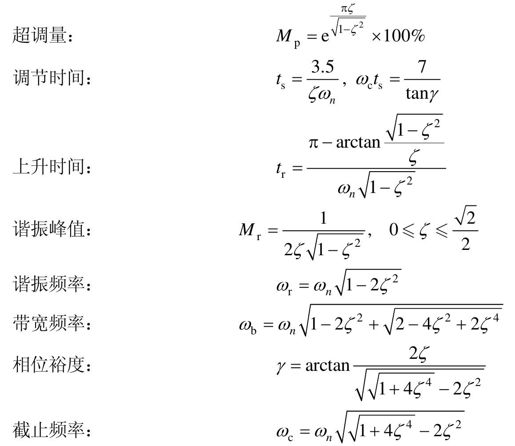
8.2.1.2 二阶系统频域指标与时域指标的关系
各类性能指标是从不同的角度表示系统性能的,它们之间存在内在联系。二阶系统是设计中最常见的系统,对于二阶系统,时域指标和频域指标能用数学公式准确地表示出来,它们可统一采用阻尼比ζ和无阻尼自然振荡频率ωn来进行如下描述。
8.2.2 控制系统校正概述
为使控制系统能满足一定的性能指标,通常需要在控制系统中引入一定的附加装置,称为控制器或校正装置。
根据校正装置的特性,可分为超前校正装置、滞后校正装置和滞后—超前校正装置。
- 超前校正装置
校正装置输出信号在相位上超前于输入信号,即校正装置具有正的相角特性,这种校正装置称为超前校正装置,对系统的校正称为超前校正。
- 滞后校正装置
校正装置输出信号在相位上滞后于输入信号,即校正装置具有负的相角特性,这种校正装置称为滞后校正装置,对系统的校正称为滞后校正。
- 滞后-超前校正装置
校正装置在某一频率范围内具有负的相角特性,而在另一频率范围内却具有正的相角特性,这种校正装置称为滞后-超前校正装置,对系统的校正称为滞后-超前校正。
根据校正装置与被控对象的不同连接方式,可分为串联校正、反馈(并联)校正、前馈校正和干扰补偿等。串联校正和并联校正是最常见的两种校正方式。
- 串联校正
如果校正元件与系统的不可变部分串联起来,如图8.2所示,则称这种形式的校正为串联校正。串联校正通常设置在前向通道中能量较低的点,为此通常需要附加放大器以增大增益,补偿校正装置的衰减或进行隔离。
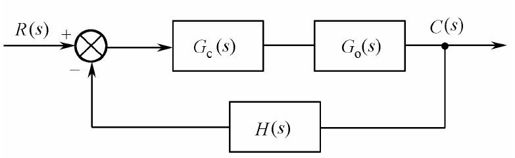
图8.2 串联校正
图8.2中的Go(s)表示前向通道不可变部分的传递函数,H(s)表示反馈通道不可变部分的传递函数,Gc(s)表示校正部分的传递函数。
- 反馈校正
如果从系统的某个元件输出取得反馈信号,构成反馈回路,并在反馈回路内设置传递函数为Gc(s)的校正元件,如图8.3所示,则称这种形式的校正为反馈校正。反馈削弱了前向通道上元件变化的影响,具有较高的灵敏度,单位反馈时也容易控制偏差,这就是较多地采用反馈校正的原因。
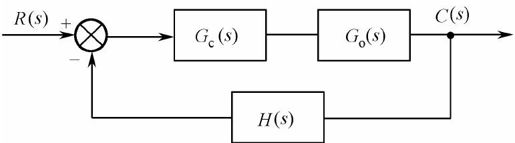
图8.3 反馈校正
- 前馈校正
如果从系统的输入元件输出取得前馈信号,构成前馈回路,并在前馈回路内设置传递函数为Gc(s)的校正元件,如图8.4所示,则称这种形式的校正为前馈校正,它是在系统反馈回路之外采用的校正方式之一。前馈校正通常用于补偿系统外部扰动的影响,也可用于对控制输入进行校正。

图8.4 前馈校正
