4.5 MATLAB/Simulink在模型中的应用
由于传递函数表示为多项式之比的形式,因此下面先讲述MATLAB中多项式处理相关的函数。
4.5.1 多项式处理相关的函数
MATLAB中多项式用行向量表示,行向量元素依次为降幂排列的多项式的系数。
- 多项式乘法函数conv()
MATLAB中提供的卷积分函数conv()可以用来进行多项式乘法处理,其常见的函数调用格式为:
- C=conv(A,B)
其中,A和B分别表示一个多项式的系数(通常是降幂排列),C为A和B多项式的乘积多项式。
注意
conv()函数的调用允许多级嵌套。
- 多项式求根函数roots()
传递函数G(s)输入之后,分别对分子和分母多项式进行因式分解,则可求出系统的零极点。
MATLAB中提供了多项式求根函数roots(),其常见的函数调用格式为:
- r= roots(p)
其中,p为多项式,r为所求的根。
- 由根创建多项式函数poly()
如果已知多项式的因式分解式或特征根r,可用MATLAB函数poly()直接得出特征多项式系数矢量p,其常见的调用格式为:
- p=poly(r)
可见,函数roots( )与函数poly( )互为逆运算。
- 求多项式在给定点的值函数polyval()
如果已知多项式p,要求其变量取a时的值v,可用MALAB中的函数polyval( )来求取,其常见的调用格式为:
- v=polyval(p,a)
4.5.2 建立传递函数相关的函数
假设系统是单输入单输出(SISO)系统,其输入、输出分别用u(t)、y(t)来表示,则得到线性系统的传递函数模型:

在MATLAB语言中,可以利用传递函数分子、分母多项式的系数向量进行描述,分子num、分母den多项式的系数向量分别为:

这里分子、分母多项式系数按s的降幂排列。
- 建立传递函数模型的函数tf()
MATLAB提供了建立传递函数模型的函数tf(),其常见的调用格式如下:
(1)sys=tf(num, den)。
(2)sys=tf(num, den, 'InputDelay', tao)。
其中,num是分子多项式系数行向量,den是分母多项式系数行向量,sys是建立的传递函数。
调用格式(1)建立的是常规系统G(s)的传递函数。调用格式(2)建立的是带时间延迟的系统Gd(s)=G(s)e-τs的传递函数,其中InputDelay为关键词,也可写成OuputDelay,对于线性SISO系统,二者是等价的。tao为系统延迟时间τ的数值。
- 提取模型中分子分母多项式系数的函数tfdata()
对于已经建立的传递函数模型,MATLAB提供了函数tfdata(),可以从传递函数模型中提取模型中的分子分母多项式系数,其常见的调用格式如下:
- [num, den] =tfdata(sys,'v')
其中,v为关键词,其功能是返回列向量形式的分子分母多项式系数。
4.5.3 建立零极点形式的数学模型相关函数
假设系统是单输入单输出系统(简称SISO),其零极点模型表示为:

其中,Zi(i=1,2,…,m)和Pi(i=1,2,…,n)分别为系统的零点和极点,K为系统的增益。[z]、[p]、[k]分别为系统的零极点和增益向量。
- 建立零极点形式数学模型的函数zpk()
MATLAB提供了建立零极点形式的数学模型zpk(),其常见的调用格式如下:
(1)sys=zpk([z],[p],[k])。
(2)sys=zpk(z,p,k,'InputDelay',tao)。
其中,[z]、[p]、[k]分别为系统的零极点和增益向量,sys是建立的零极点形式的数学模型。
格式(1)建立的是常规系统G(s)的零极点形式的数学模型,格式(2)建立的是带时间延迟的系统Gd(s)=G(s)e-τs的零极点形式的数学模型,其中InputDelay为关键词,也可写成OuputDelay,对于线性SISO系统,二者是等价的。tao为系统延迟时间τ的数值。
- 提取模型中零极点和增益向量的函数zpkdata()
对于已经建立的零极点形式的数学模型,MATLAB提供了函数zpkdata(),可以从模型中提取出模型中的零极点和增益向量,其常见的调用格式如下:
- [z, p, k]=zpkdata(sys, 'v')
其中,v为关键词,其功能是返回列向量形式的零极点和增益向量。
- 传递函数模型部分分式展开的函数residue()
MATLAB提供了函数residue(),它的功能是对两个多项式的比进行部分展开,以及把传递函数分解为微分单元的形式,其常见的调用格式如下:
- [r, p, k]=residue(b, a)
其中,向量b和a是按s的降幂排列的多项式系数。部分分式展开后,余数返回到向量r,极点返回到列向量p,常数项返回到k。
[b, a]=residue(r, p, k)可以将部分分式转化为多项式比p(s)/q(s)。
4.5.4 建立状态空间模型相关的函数
状态方程是研究系统最有效的系统数学描述,在引进相应的状态变量后,可将一组一阶微分方程表示成状态方程的形式。在MATLAB中,系统状态空间用(A, B, C, D)矩阵组表示。
- 建立状态空间模型的函数ss()
MATLAB提供了建立状态空间模型的函数ss(),其常见的调用格式如下:
- sys=ss(A,B,C,D)
其中,(A, B, C, D)为系统状态空间的矩阵组表示,sys是建立的状态空间模型。
- 提取模型中状态空间矩阵的函数ssdata()
对于已经建立的状态空间模型,MATLAB提供了函数ssdata(),可以从模型中提取出模型的状态空间矩阵,其常见的调用格式如下:
- [A,B,C,D]=ssdata(sys)
其中,sys是建立的状态空间模型,[A, B, C, D]为系统状态空间的矩阵。
4.5.5 Simulink中的控制系统模型表示
在Simulink基本模块中选择“Continuous”后,单击便看到其中包括的连续模块,它包括的子模块及功能如表4.3所示。
表4.3 连续模块的名称及功能

使用这些模块进行仿真时,将图标拖到Simulink的模型窗口中,双击图标就打开了其属性设置对话框,设置具体的模型系数即可。
例如,要建立传递函数 的模型,将“Transfer Fcn”图标拖到模型窗口,双击传递函数打开其属性设置对话框,并将其中的Numerator设置为“[10]”,Denominator设置为“[1 3 0]”,便建立了传递函数的模型,如图4.6所示。
的模型,将“Transfer Fcn”图标拖到模型窗口,双击传递函数打开其属性设置对话框,并将其中的Numerator设置为“[10]”,Denominator设置为“[1 3 0]”,便建立了传递函数的模型,如图4.6所示。
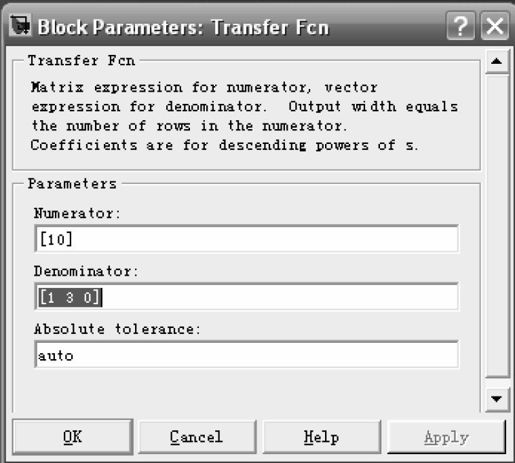
图4.6 模块参数设置对话框
4.5.6 Simulink中模型与状态空间模型的转化
Simulink提供了以状态空间形式线性化模型的函数命令:linmod和dlinmod,这两个命令需要提供模型线性化时的操作点,它们返回的是围绕操作点处系统线性化的状态空间模型。linmod命令执行的是连续系统模型的线性化,linmod2命令也是获取线性模型,采用高级方法,而dlinmod命令执行的是离散系统模型的线性化。
linmod命令返回的是由Simulink模型建立的常微分方程系统的线性模型,命令的语法结构为:
- [A, B, C, D] = linmod ('sys', x, u)
这里,sys是需要进行线性化的Simulink模型系统的名称,linmod命令返回的就是sys系统在操作点处的线性模型。x是操作点处的状态向量;u是操作点处的输入向量,如果删除x和u,缺省值为0。
需要注意的是,linmod函数如果要线性化包含微分(Derivative)或传输滞后(Transport Delay)模块的模型时会比较麻烦,在线性化之前,需要用一些专用模块替换这两个模块,以避免产生问题。
这些模块在Simulink Extras库下的Linearization子库中:
(1)对于Derivative模块,用Linearization子库中的 Switched derivative for linearization模块替换;
Switched derivative for linearization模块替换;
(2)对于Transport Delay模块,用 Switched transport delay for linearization模块替换(这些模块要求系统中安装了Control System Toolbox)。
Switched transport delay for linearization模块替换(这些模块要求系统中安装了Control System Toolbox)。
当模型中有Derivative模块时,也可以试试把导数模块与其它模块合并起来。例如,如果一个Derivative模块与一个Transfer Fcn模块串联,最好用单个一个Transfer Fcn模块实现。
4.5.7 应用实例
下面通过几个典型的应用实例讲述MATLAB/Simulink在模型中的应用。
【例4-4】 求传递函数 的分子和分母多项式,并求传递函数的特征根。
的分子和分母多项式,并求传递函数的特征根。
解:MATLAB程序代码如下。
- num=conv([1,1],conv([1,2,6],[1,2,6]) ) ;%num为分子多项式,conv()函数采用嵌套形式
- den=conv([1,0,0],conv([1,3],[1,2,3,4]) );%den为分母多项式,conv()函数采用嵌套形式
- r=roots(den); %r为分母多项式的根
程序运行结果如下:
- num = 1 5 20 40 60 36
- den = 1 5 9 13 12 0 0
- r = 0
- 0
- -3.0000
- -1.6506
- -0.1747 + 1.5469i
- -0.1747 - 1.5469i
由计算结果可知,传递函数G(s)的分子多项式为:s5+5s4+20s3+40s2+60s+36;分母多项式为:s6+5s5+9s4+13s3+12s2。
传递函数的分子分母多项式表示形式为: ,传递函数的特征根为0、0、-3、-1.6506、-0.1747+1.5469i和-0.1747-1.5469i。
,传递函数的特征根为0、0、-3、-1.6506、-0.1747+1.5469i和-0.1747-1.5469i。
【例4-5】 某一以微分方程描述系统的传递函数,其微分方程描述如下:

试使用MATLAB建立其模型。
解:建立模型的MATLAB代码如下。
- num=[1, 4, 8]; den=[1, 11, 11, 10] %分子、分母多项式系数行向量
- G=tf(num, den) %建立传递函数模型
程序运行结果如下:
- s^2 + 4 s + 8
- s^2 + 4 s + 8
s^3 + 11 s^2 + 11 s + 10
从结果可知,系统的传递函数 。
。
【例4-6】 已知某系统的传递函数 ,求其分子分母多项式、零极点。
,求其分子分母多项式、零极点。
解:MATLAB程序代码如下。
- num=[1, 4, 8]; den=[1, 11, 11, 10] %传递函数分子、分母多项式系数行向量
- G=tf(num, den) %建立传递函数模型
- [tt, ff]=tfdata(G, 'v') %提取传递函数的分子和分母多项式
- [z, p, k]=tf2zp(num, den) %提取传递函数的零极点和增益
程序运行结果如下:
- tt = 0 1 4 8
- ff = 1 11 11 10
- z = -2.0000 + 2.0000i %系统的零点
- -2.0000 - 2.0000i
- p = -10.0000 %系统的极点
- -0.5000 + 0.8660i
- -0.5000 - 0.8660i
- k = 1 %系统的增益
【例4-7】 已知某系统的传递函数 ,求其部分分式表示形式。
,求其部分分式表示形式。
解:MATLAB程序如下。
- num=[2, 0, 9, 1]; den=[1, 1, 4, 4]; %传递函数分子、分母多项式系数行向量
- [r, p, k]=residue(num, den) %求取系统部分分式表示
程序运行结果如下:
- r =0.0000 - 0.2500i
- 0.0000 + 0.2500i
- -2.0000
- p =-0.0000 + 2.0000i
- -0.0000 - 2.0000i
- -1.0000
- k = 2
可知结果表达式为: 。
。
【例4-8】 已知某两输入两输出系统的状态方程和输出方程如下:
 ,求其状态空间模型。
,求其状态空间模型。
解:MATLAB程序代码如下。
- A=[1 6 9 10;3 12 6 8;4 7 9 11;5 12 13 14];B=[4 6;2 4;2 2;1 0];%系统系数矩阵
- C=[0 0 2 1;8 0 2 2]; D=zeros(2, 2); %系统系数矩阵
- G=ss(A,B,C, D) %生成状态空间模型
程序运行结果如下:
- a = x1 x2 x3 x4
- x1 1 6 9 10
- x2 3 12 6 8
- x3 4 7 9 11
- x4 5 12 13 14
- b = u1 u2
- x1 4 6
- x2 2 4
- x3 2 2
- x4 1 0
- c = x1 x2 x3 x4
- y1 0 0 2 1
- y2 8 0 2 2
- d = u1 u2
- y1 0 0
- y2 0 0
从结果可知,在MATLAB中生成了题中所示的状态空间模型。
【例4-9】 已知单位负反馈系统的开环传递函数为 ,试分别利用Simulink中的传递函数表示模型和零极点表示模型建立整个系统的模型,并将Simulink中的模型转换为状态空间模型。
,试分别利用Simulink中的传递函数表示模型和零极点表示模型建立整个系统的模型,并将Simulink中的模型转换为状态空间模型。
解:建立Simulink中的传递函数表示模型的基本步骤如下:
(1)利用Simulink的Library窗口中的【File】|【New】,打开一个新的模型窗口。
(2)建立零极点表示的模型,分别从数学运算库(Math)、连续系统库(Continuous)中,用鼠标把传递函数表示模型(Transfer Fcn)、相加器(Sum)标准功能模块选中,并将其拖至模型窗口。
(3)按要求先将前向通道连接好,然后把相加器(Sum)的另一个端口与传递函数和示波器间的线段相连,形成闭环反馈,并将相加器设置为“+-”,形成单位负反馈。
(4)将端口和子系统模块(Ports&Subsystems)中的In输入口模块、Out输出口模块、拖至模型窗口;把In模块作为系统的输入,Out模块作为系统的输出,与系统连接起来。将模型存为“untitled1.mdl”文件。
(5)双击Transfer Fcn,打开其属性设置对话框,并将其中的Numerator(分子多项式表达式系数)设置为“[2 10]”,Denominator(分母多项式表达式系数)设置为“[1 3 0]”,设置的界面及产生的模型如图4.7所示。
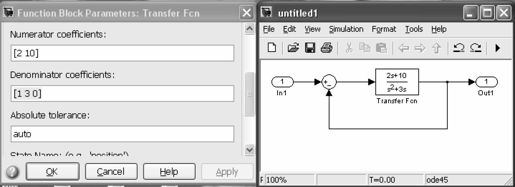
图4.7 Simulink中的传递函数表示模型及参数设置界面
(6)在MATLAB命令窗口中运行以下命令,得到线性状态空间模型(A, B, C, D)
- [A,B,C,D]=[A,B,C,D]=linmod('untitled1');
输出结果为:
- A = -5 -10
- 1 0
- B = 1
- 0
- C = 2 10
- D = 0
根据题意,系统的开环传递函数的零极点表示形式为 ,零点为-5;极点为0和-3,增益为2。
,零点为-5;极点为0和-3,增益为2。
建立Simulink中的零极点表示模型的基本步骤如下:
(1)利用Simulink的Library窗口中的【File】|【New】,打开一个新的模型窗口。
(2)建立零极点表示的模型,分别从数学运算库(Math)、连续系统库(Continuous)中,用鼠标把零极点表示模型(Zero-Pole)、相加器(Sum)标准功能模块选中,并将其拖至模型窗口。
(3)按要求先将前向通道连接好,然后把相加器(Sum)的另一个端口与传递函数和示波器间的线段相连,形成闭环反馈,并将相加器设置为“+-”,形成单位负反馈。
(4)将端口和子系统模块(Ports&Subsystems)中的In输入口模块、Out输出口模块、拖至模型窗口;把In模块作为系统的输入,Out模块作为系统的输出,与系统连接起来。将模型存为“untitled1.mdl”文件。
(5)双击零极点表示模型,打开其属性设置对话框,并将其中的Zeros设置为“[-5]”,Poles设置为“[0-3]”,Gain设置为“[2]”,设置的界面及产生的模型如图4.8所示。
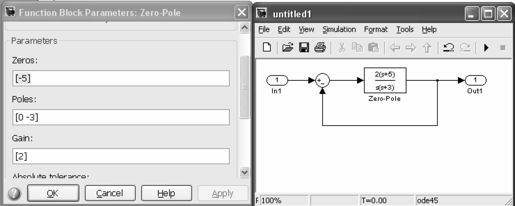
图4.8 Simulink中的零极点表示模型及参数设置界面
