7.8 综合实例及MATLAB/Simulink应用
下面通过一个综合实例,讲述MATLAB/Simulink在本章中的应用。
【例7-9】 已知晶闸管-直流电机开环系统的结构图如图7.23所示。试用Simukink动态结构图进行频域分析并求频域性能指标。
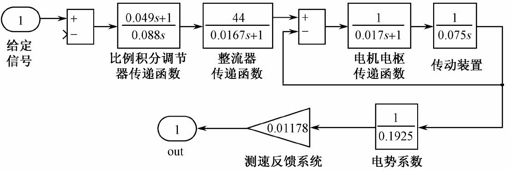
图7.23 系统结构图
解:利用Simulink求解的基本步骤如下。
【步骤1】 在Simulink中建立该系统的动态模型,如图7.24所示。
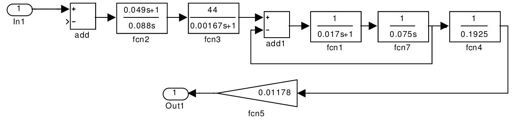
图7.24 Simulink中的系统动态模型
并将模型存为“Samples_7_9.mdl”。
【步骤2】 求取系统的线性状态空间模型,并求取频域性能指标。
在MATLAB命令窗口中运行以下命令:
- [A,B,C,D]=linmod('Samples_7_9'); %提取Simulink模型的线性状态空间模型
- sys=ss(A,B,C,D);
- margin(sys); %求取频域指标
程序运行后,输出如图7.25所示。
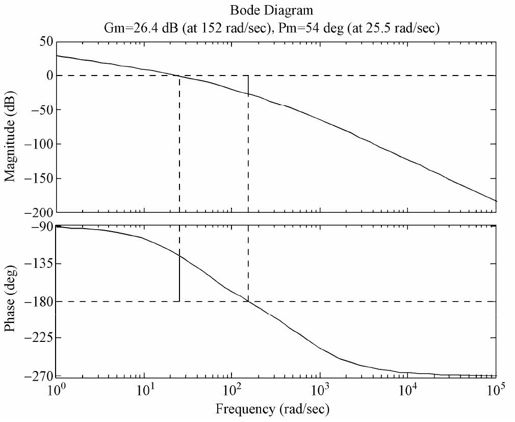
图7.25 系统的开环Bode图和频域性能指标
从图中可以看出:
- 幅值裕度GM=26.4dB,穿越频率为152 rad/sec;
- 相位裕度PM=54 deg,穿越频率为25.5 rad/sec。
习 题
【7.1】 给定控制系统的开环传递函数G(s)分别为 、
、 、
、 、
、 和
和 ,试用MATLAB分别绘制其幅频特性曲线和Nyquist曲线,并判断闭环系统的稳定性。
,试用MATLAB分别绘制其幅频特性曲线和Nyquist曲线,并判断闭环系统的稳定性。
【7.2】 已知单位负反馈控制系统的开环传递函数G(s)分别为 和
和 。试分析系统增益K对相角裕量的影响。
。试分析系统增益K对相角裕量的影响。
【7.3】 某控制系统结构如图7.A所示。
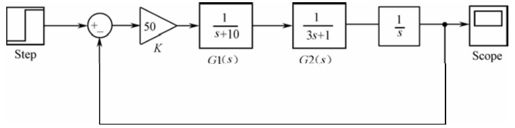
图7.A 习题
(1)利用MATLAB建立图示控制系统的数学模型;
(2)绘制开环系统的Bode曲线和Nyquist曲线;
(3)判断系统的稳定性,如果不稳定,绘制闭环系统的零极点图,给出极点的位置;
(4)计算系统的截止角频率、相角裕量和幅值裕量;
(5)绘制系统的阶跃响应曲线。
【7.4】 设单位负反馈控制系统的开环传递函数G(s)为
(1)利用MATLAB建立上述控制系统的数学模型;
(2)使用MATLAB中的margin命令,绘制系统的Bode图,分析系统的稳定性,并读出幅值穿越频率的值。
【7.5】 给定单位负反馈控制系统的开环传递函数G(s)分别为 、
、 和
和 ,试利用LTI Viewer工具,分别绘制其Bode图和Nyquist曲线,判断系统的稳定性。如果系统稳定,利用margin命令计算系统的相角裕量和增益裕量。
,试利用LTI Viewer工具,分别绘制其Bode图和Nyquist曲线,判断系统的稳定性。如果系统稳定,利用margin命令计算系统的相角裕量和增益裕量。
【7.6】 设单位负反馈控制系统的开环传递函数G(s)分别为 、
、 和
和 ,试绘制其Nyquist曲线,并确定使闭环系统稳定的K的取值范围。
,试绘制其Nyquist曲线,并确定使闭环系统稳定的K的取值范围。
【7.7】 设单位负反馈控制系统的开环传递函数G(s)分别为 、
、
 和
和 ,试绘制其Nyquist曲线,判断闭环系统的稳定性。对于闭环不稳定的系统,通过Nyquist曲线得出位于S右半平面的闭环极点个数。
,试绘制其Nyquist曲线,判断闭环系统的稳定性。对于闭环不稳定的系统,通过Nyquist曲线得出位于S右半平面的闭环极点个数。
【7.8】 已知控制系统的开环传递函数为
(1)利用MATLAB验证:当 时,闭环系统稳定;
时,闭环系统稳定;
(2)选定几组符合上述条件的n和K,绘制系统的阶跃响应曲线。
